扫描声呐的原理及应用
简介
初学者可能对声呐作用原理和扫描声呐数据图像不理解,故编写此指南来加深用户对扫描声呐的应用。本指南将详解地从声呐作用原理以及将扫描声呐应用在ROV上的一些常规做法。并在此基础上介绍一些安装经验。虽然在本指南中使用 P360 扫描声呐和 BlueROV2 作为范例,但是这些概念足够通用,可以作为绝大部分机械扫描声呐与水下机器人集成系统的参考。

工作原理
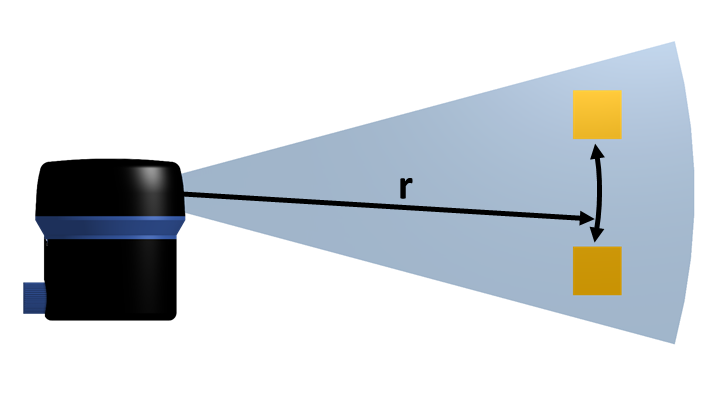
扫描声呐Scanning SONAR(声学导航与测距系统Sound Navigation and Ranging)是一种有源声呐,其工作原理是声呐设备在水中发出声波脉冲,声呐通过记录每个声波脉冲从其传播方向前方的物体反射回声,来确定声呐设备与物体之间的距离。进一步来讲,当声呐发出一束三维"扇形声波"时,此类声波在垂直方向上角度较大,在水平方向上角度较小,以此用来获取发射方向上的声学横截面,然后获取这个方向上的横截面信息作为单个图像显示在软件界面上。
声速
通过将水中的已知声速与测量声呐发出脉冲到声呐接收回声脉冲的时间。两者结合起来,可以计算出扫描声呐与障碍物之间的距离。 距离计算的公式为:
距离=水中的已知声速*(回声波返回的时间测量值/ 2)
因此,声速是影响准确测量与目标距离的主要因素之一。
通常,盐水中的声速约为1500m / s,但这会根据水温,盐度和声呐使用深度而变化。 声速计算器可用于获取不同环境条件下的更准确的声速值。
扫描声呐不具有自动计算声速的功能,但可以在显示界面中针对当前作业环境条件更改声速。

显示界面软件Ping-Viewer的声速设置
目标反射率
与水的密度差异较大的目标(例如气体,岩石,混凝土或金属)通常具有很高的反射率并导致回声较为强烈。而 来自泥浆,淤泥,沙子和部分植物等目标由于密度与水接近,或者本身比较容易吸收声波,因此回声也会较弱。回声的强度经由调色板上的明暗(或颜色)指示显示在显示界面上。
在典型的调色板中,较暗的颜色用于较弱的回声,而较亮的颜色用于较强的回声。
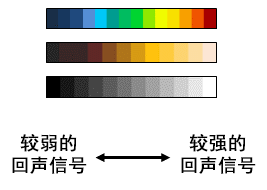
典型的扫描声呐调色板
下图的声呐图像显示了竖直悬挂的编织绳的声学信号如何比周围的水强(图像显示较亮),因为它的密度与海水有较大差异(小于水)。
水下低能见度下ROV视角竖直编织绳的图像 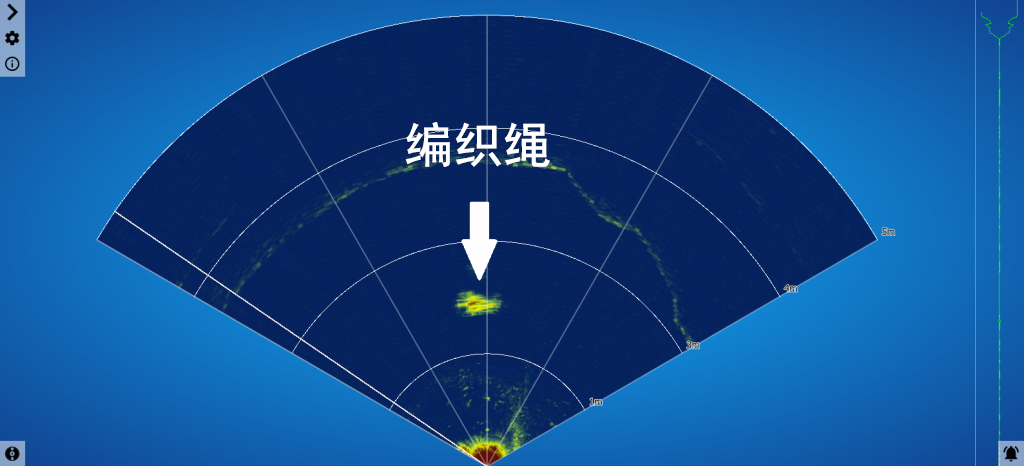
扇区扫描中的编织绳信号(自上而下的剖视图,显示绳索为点)
声束图
在想象扫描声呐如何利用声波工作时,我们通常将它们与在黑暗区域中点亮的手电筒进行类比。 使用者只能看到手电筒光束照射到的区域,其余区域仍然是黑暗的。
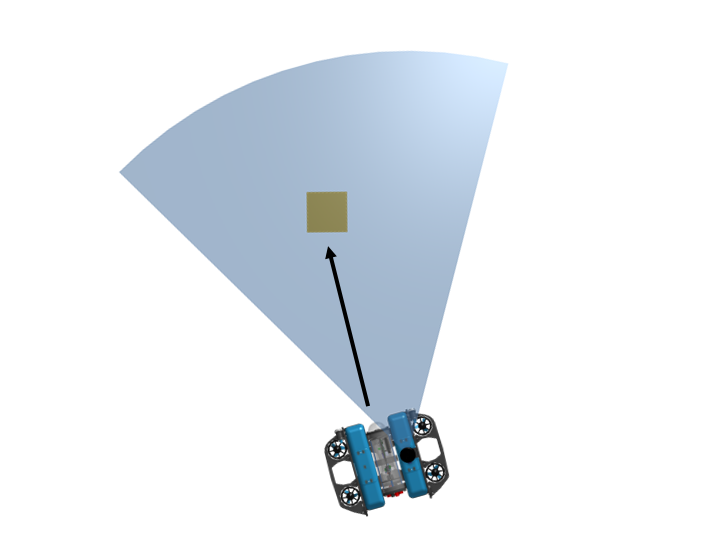
与光束相比,扫描声呐的声束具有固定的宽度和高度,分别称为水平和竖直波束。 正是这种声束以声能(而不是光能)“照亮”了周围的水下区域。扫描声呐发出的声波通常具有较宽的竖直声束范围和较窄的水平声束范围,以在换能器前方产生较窄的“切片”。
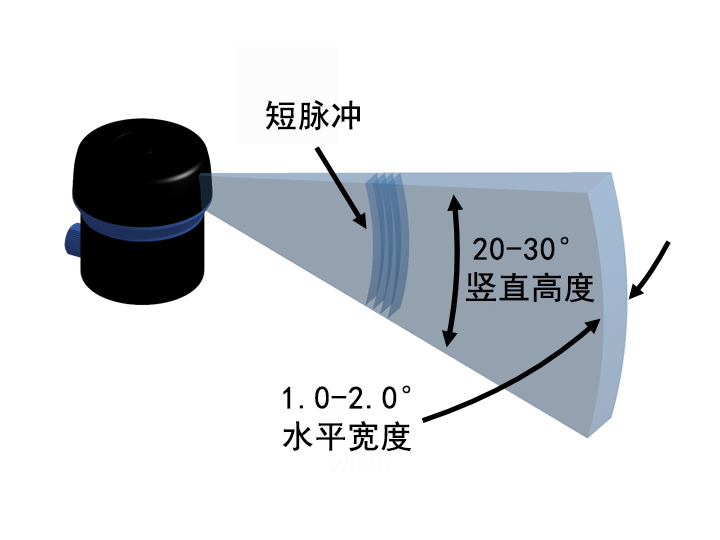
典型的扫描声呐扇形声束 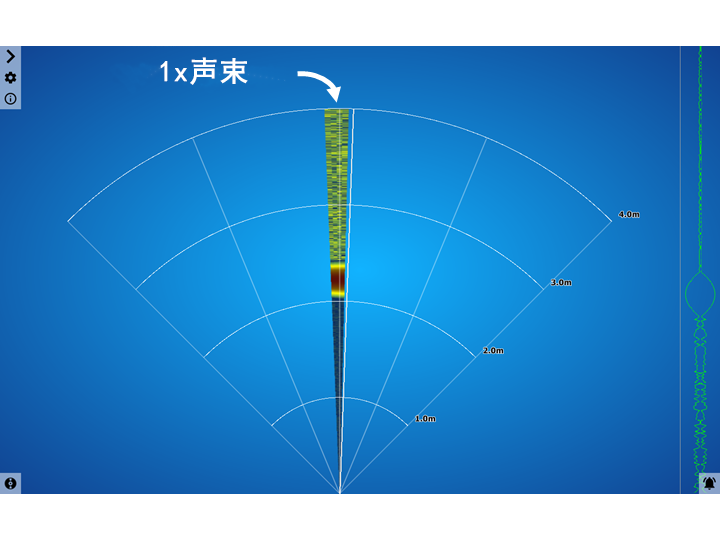
声呐显示界面显示一个声束“切片”
为了“绘制”图像或定位目标,扫描声呐内部的换能器探头会通过步进电机进行机械旋转,以将“切片”堆积到显示软件上的界面中。想像一与下手电筒的类比,“切片”就像在当手电筒光束扫过某个区域时,利用照相机拍摄快照一样。 用户无法使用手电筒的窄光束立即看到广域范围内的所有内容,但是通过拼接相机拍摄的图像“切片”后,使用者能够在一张图像中查看手电筒所扫到的区域(就像拍摄全景图片一样)。
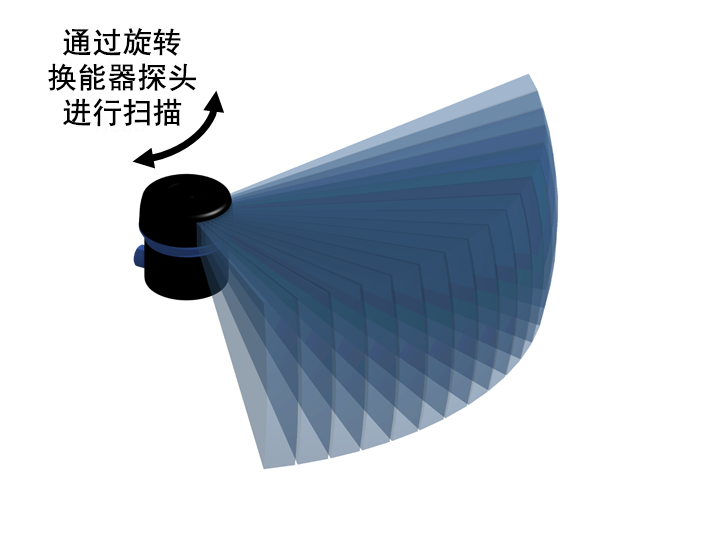
机械旋转扫描声呐内的换能器探头 
多个声束形成“扫描图像”
目标可视性
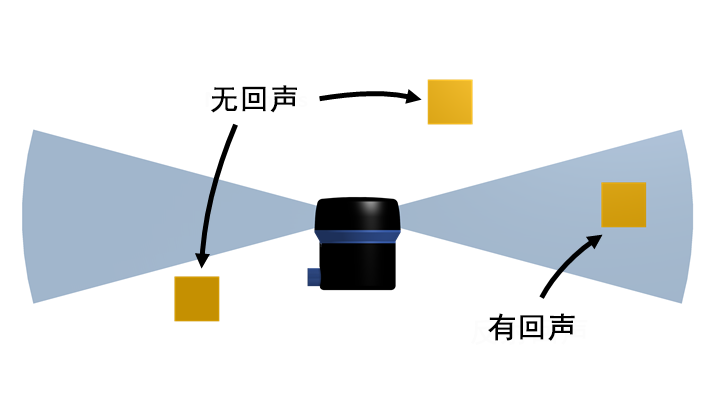
声呐水平和竖直波束扫描范围内的目标将被声能“照亮”,其回声将被反射回声呐以被接收并解析为图像。声束扫描范围之外的目标(扫描范围以外的,或其上下部)将不会显示在显示界面上
竖直入射角和倾斜范围
扫描声呐无法区分具有相同竖直入射角的物体(也称为“slant range倾斜距离”)。 这意味着,如果两个目标同时位于声呐前方相同的距离,并且共同位于同一扫描竖直面内,则声呐会将这两个目标显示为由其返回的两个回声束重叠形成的单个结果。如果遇到这种情况,用户需要提高ROV距离海底的高度,并重新扫描来区分它们。
海床视图
类比手电筒的光束,加上扫描声呐无法区分不同高度的目标,因此可以将显示界面上显示的声呐图像视为该区域的“俯视图”。
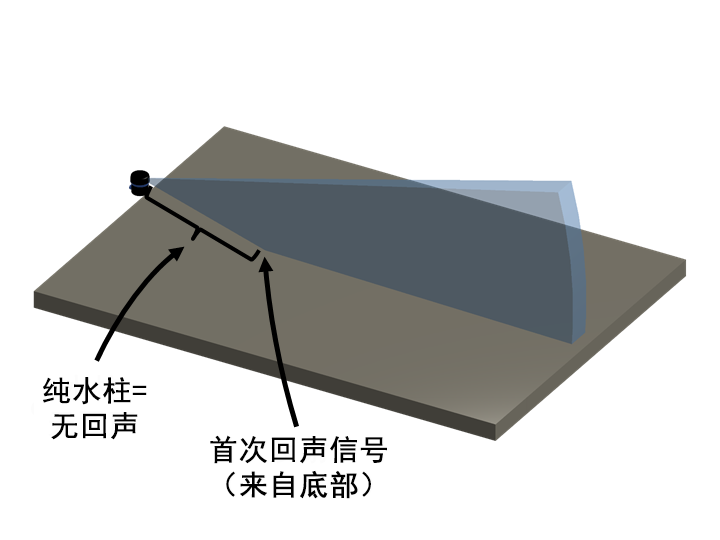
扇形声呐束与平坦的底部相交 
扇形声呐束与平坦的底部和目标相交 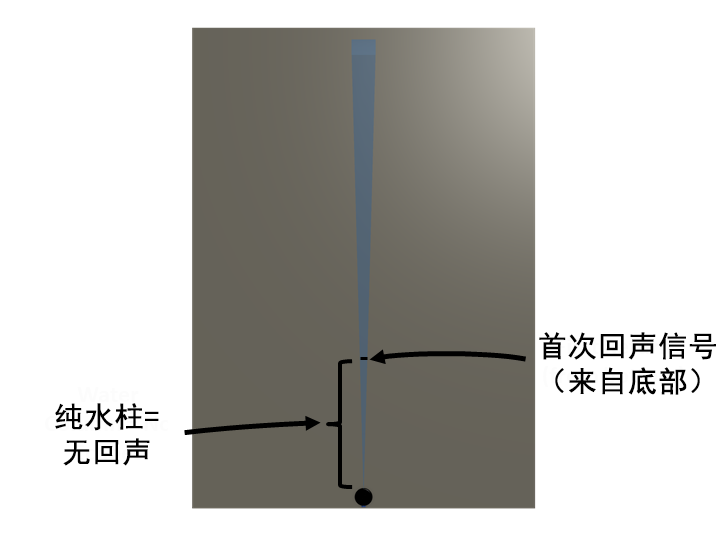
生成的从上往下看的视图,如显示界面所示 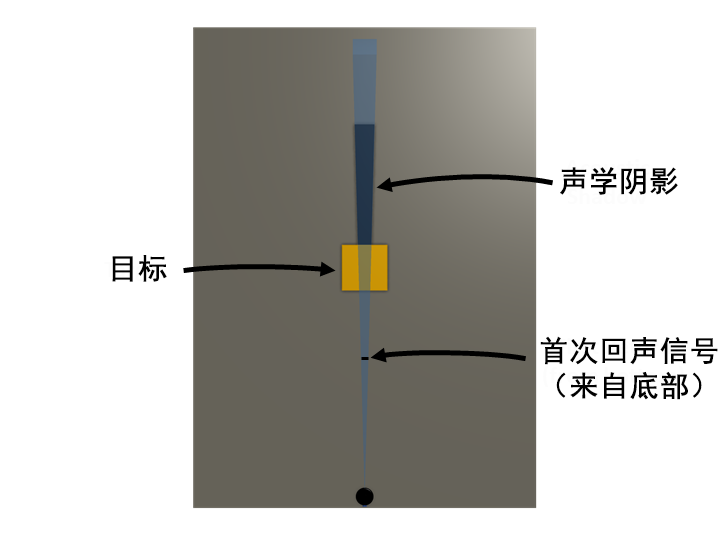
生成的从上往下看的视图,如显示界面所示
底部可视化
对于那些需要搜寻海底,且担心远距离带来的声波信号衰减的的用户来说,可以按一定角度安装扫描声呐,以便“照亮”几个不同的海底区域,并在软件显示界面上查看他们。
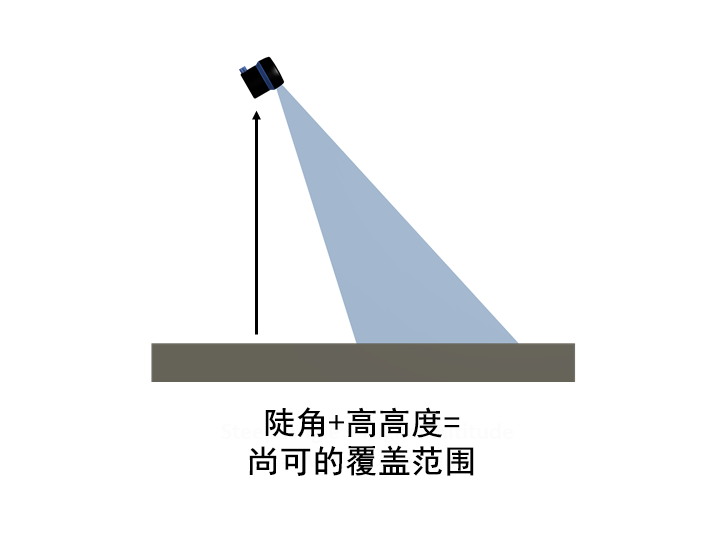
如果声呐高度较低且向下倾斜角度较大(陡角),则仅显示海底总面积的一小部分。 通过增加高度,声呐可以“照亮”更大范围的海底。

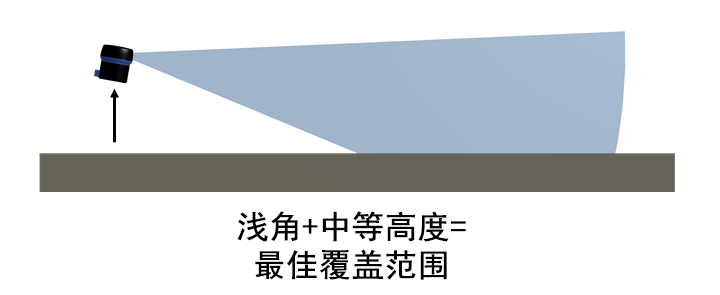
当使用者在海底寻找目标时,声呐安装的最佳用法是在距海底高度与声呐安装倾斜角之间取得平衡。这会为扫描声呐取得一个较长的底部成像范围以及良好的信号强度。
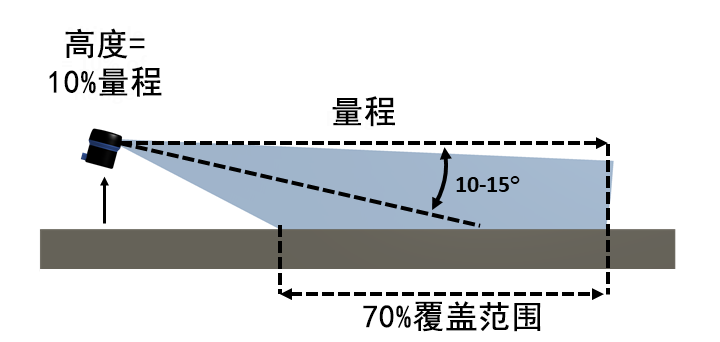
10%原则(离底高度=10%声呐扫描量程)
一般而言,如果扫描声呐具有10-15°的安装下倾角和10%工作范围的高度,则扫描声呐(侧扫和机械扫描)可以实现给定海床区域约70%的扫描覆盖率。例如,在10m的扫描量程下,声呐的高度应距离海底高1m。 在20m的量程下,声呐的高度应为2m。
声学阴影
当声呐用于定位海底的目标并且其图像用于辅助分析目标的高度、形状和方位时,仍继续采用手电筒进行类比。此时,一个“声学阴影”将会在被声能“照亮”的目标后出现。就像“可见光影(影子)”,在被手电筒照亮的目标后出现一样。
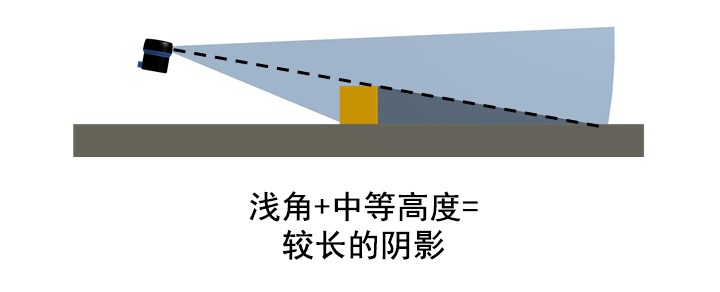
高度
如果声纳具有较高的高度和陡峭的下倾角,则声学阴影将会很小。 过小的声学阴影有时很难看清,并使目标分析变得更加困难。
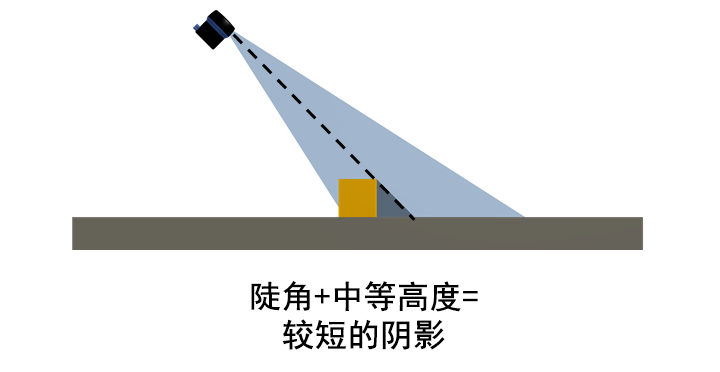
如果声呐有接近底部较低的高度,且有较小的下倾斜角,则目标投射的声学阴影会更长,从而易于辨识。
距离
由于声束的角度几何形状(呈扇形),由较远的目标投射的声学阴影将相对狭窄。 当声呐移近目标时,声学阴影宽度将增加。我们可能会在那些较宽的声学阴影中忽略其他的不可见目标,因为没有声束"照亮"它们。

较远目标产生的狭窄声学阴影 
较接近声呐的目标产生较宽的声学阴影,遮蔽次要目标
了解回声
如前几节所述,目标只有面向扫描声呐的一面才会被照亮。 因此,仅最接近声呐的边缘或表面将被照亮。
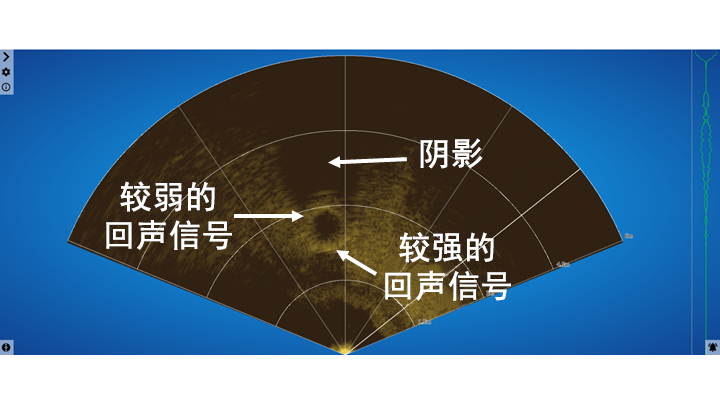
目标垂直于声呐的表面将会产生最强的回声信号,而目标其它角度的表面将会导致声波反射至声呐接收面外,从而产生较弱的回声信号。
来自目标的回声
如下图,位于海床底部的轮胎的声呐扫描图像显示,最靠近声呐的轮胎边缘产生最强的回声信号,而上轮胎表面的回声信号较弱。
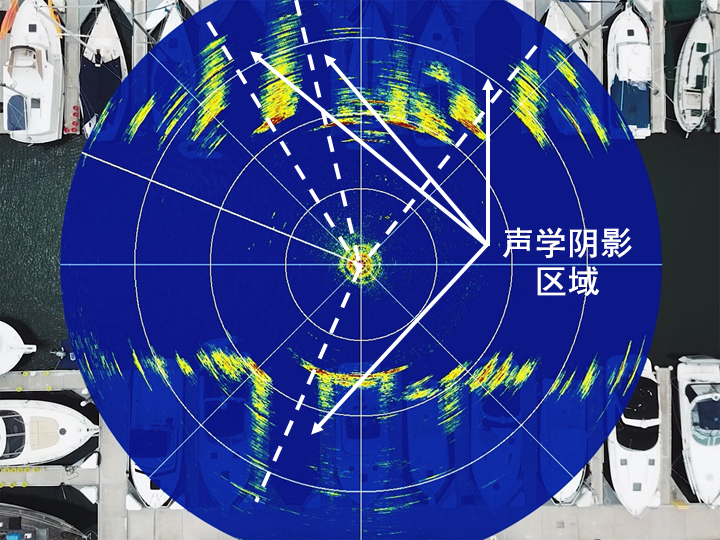
来自环境的回声
这种声学原理也可同样用于范围较大的水下环境。如下图中显示的各种码头和船体在水中的扫描影像。声呐以“视线”形式扫描时产生的明亮的显示效果。而被遮蔽在这些“显示效果”之后的区域,会被标识为阴影,或是“无回声”区域。
应用扫描声呐进行 ROV 导航
现在有了这种独特的声学图像分析方法,扫描声呐可以成为安装在ROV上的重要导航工具。在没有扫描声呐的情况下,ROV操作员必须依靠摄像头对目标和特征进行视觉分析。在能见度低的情况下,视场可能受到严重限制,距离可能不足一米。
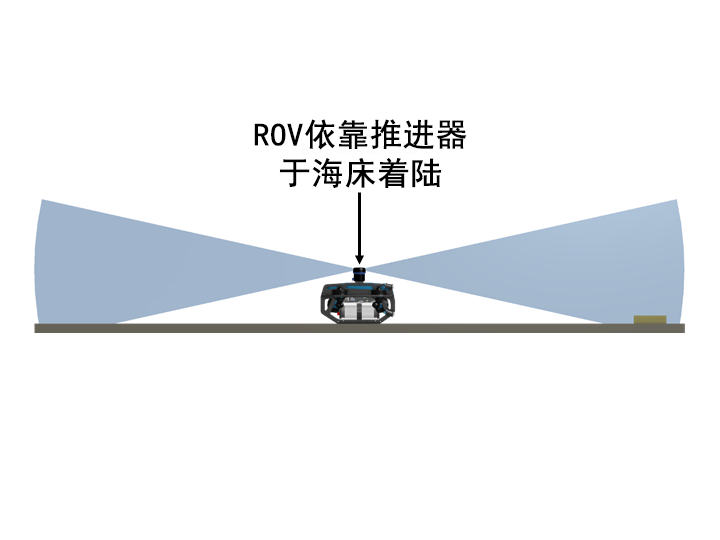
扫描声呐可以增加目标可能被定位的范围。与在海底上方巡游并目视寻找目标不同,保持静止或ROV坐底彻底扫描周围区域通常更有用。操作员可以较为方便的获得自然或人为的特征图像、潜在目标的相对方位,或排除潜在可能的区域。
在这种情况下,最好是将ROV坐底,或者缩小扫描范围,这样刷新速度将会更快,并且换能器探头将持续围绕(ROV)同一轴线进行旋转。
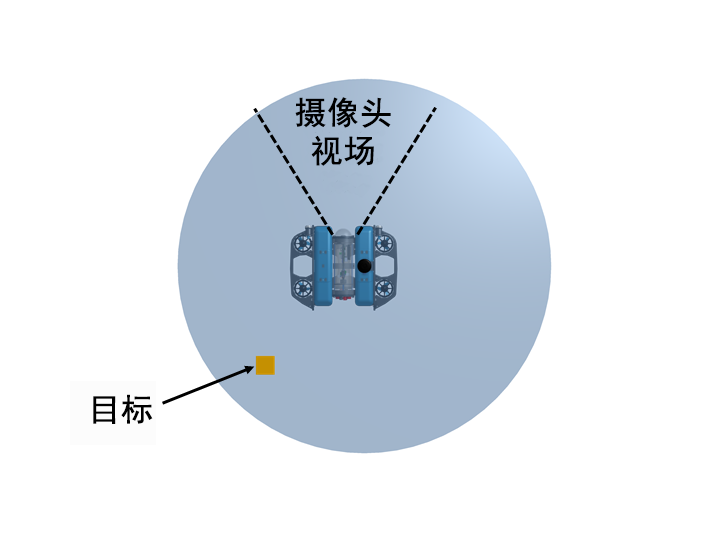
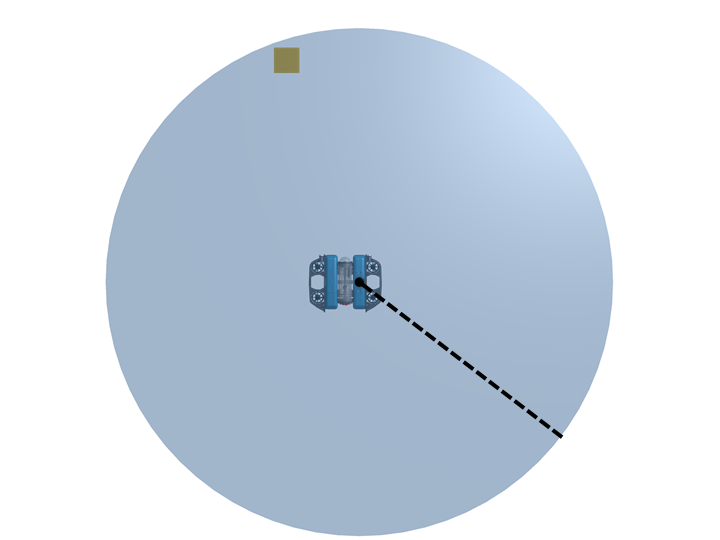
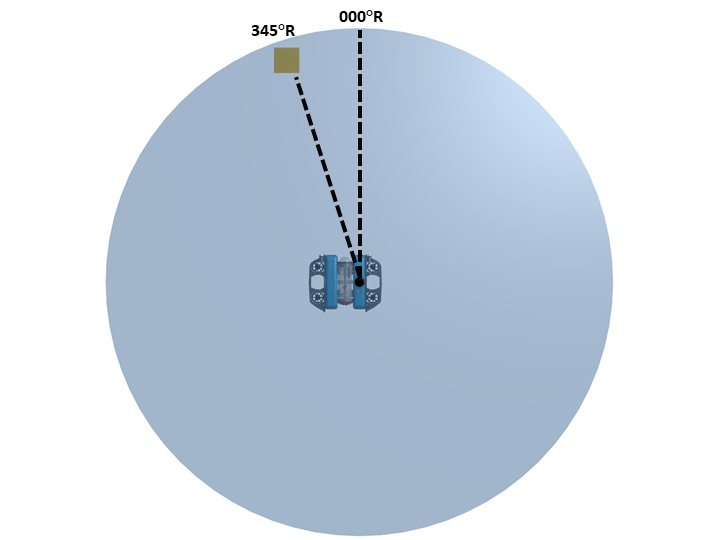
相对方位
需要注意的是,当查看扫描声呐软件界面上的图像时,目标所在的角度为“相对方位”,目标是从正前方(000°R)的顺时针角度读取的。
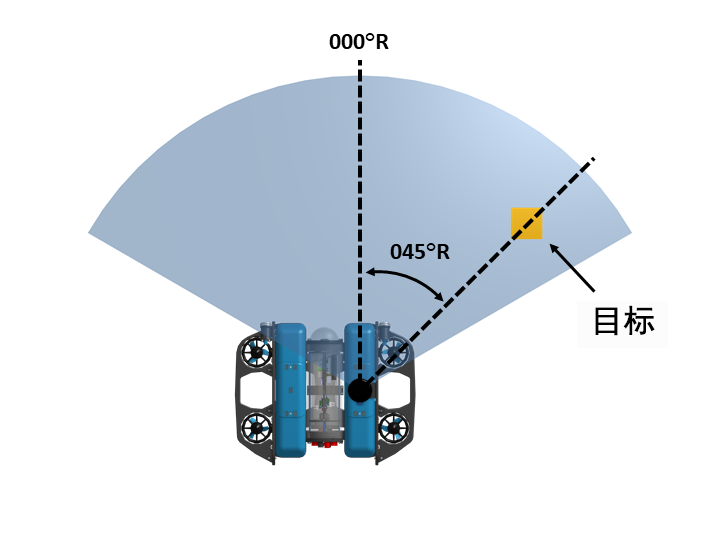
ROV与目标的相对方位 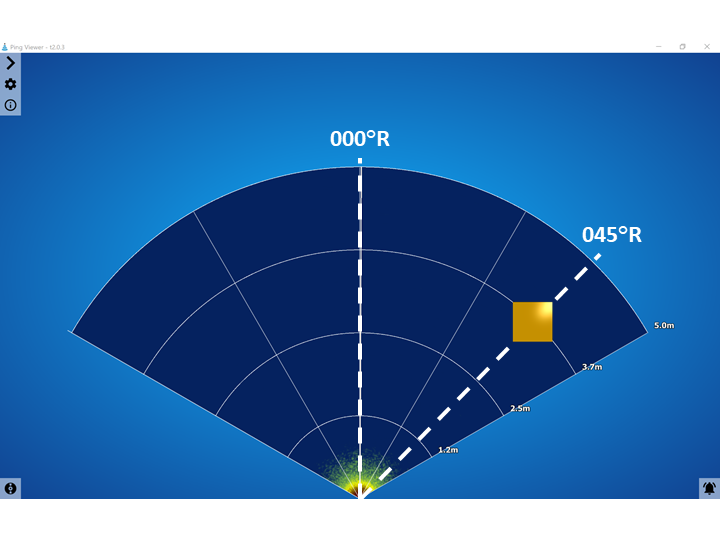
声呐软件界面上显示的相对方位
极坐标扫描
任何连续360度的声呐扫描模式都称为“极坐标扫描”(Polar Scan)。
极坐标扫描有助于在低能见度条件下获得ROV周围的环境态势。摄像头通常只有一个狭窄的视野(约90°),不能主动环顾四周或转向一边看,除非有一个可动关节。极坐标扫描有助于了解水下机器人的侧边或后方。
极坐标扫描定位ROV后方的目标 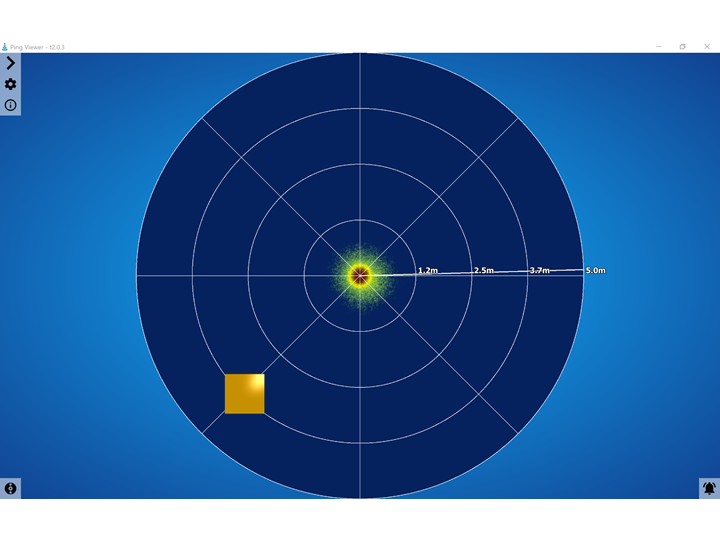
软件界面上的极坐标扫描
扇形扫描
任何少于360度的声呐扫描模式被称为“扇区扫描”。
扇区扫描有助于提高扫描刷新率,适宜对固定的目标成像或保持对目标的跟踪。而扇区扫描的缺点是无法扫描ROV的侧面或后方区域。
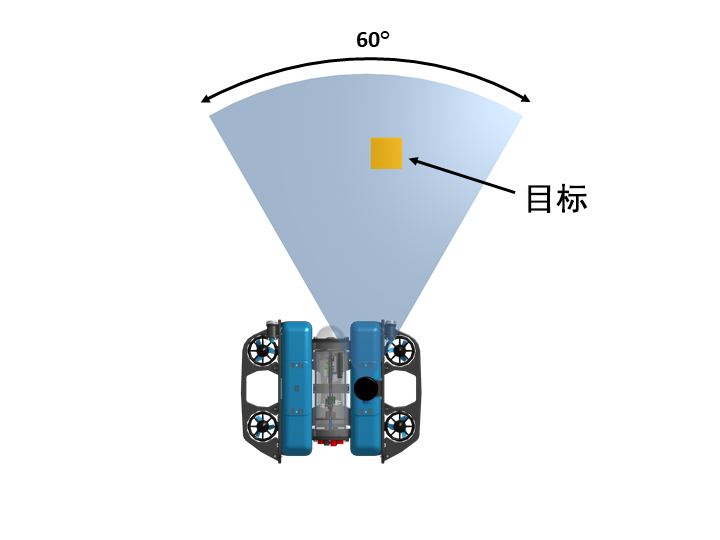
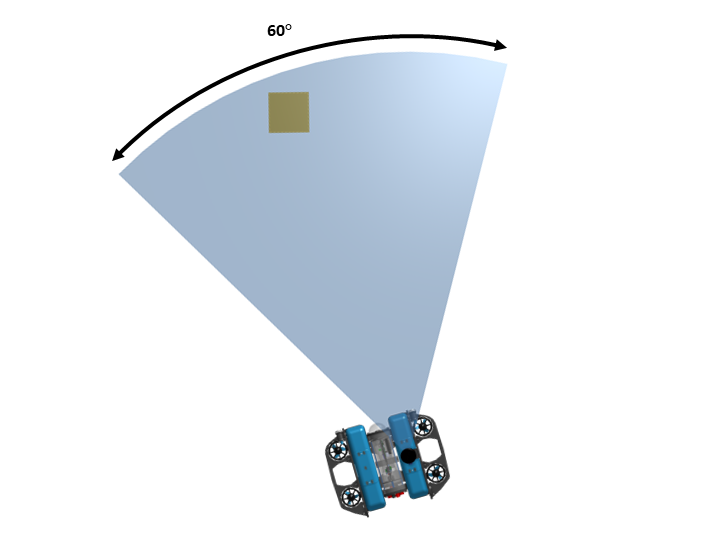
60度的扇区扫描 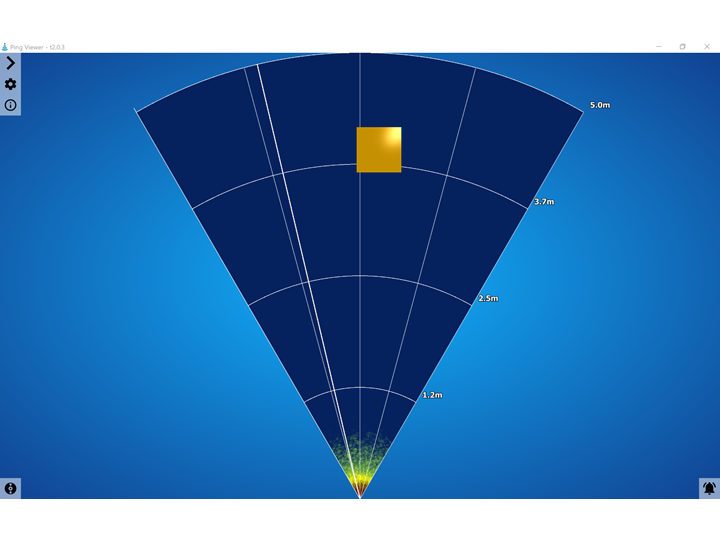
软件界面上的扇区扫描
应用扫描声呐进行目标定位
在海底或水环境中定位目标是扫描声呐的另一种用途。(还有一种用途是导航)
学习如何使用扫描声呐寻找目标需要一些练习,并且较小的目标比较大的目标更难定位和识别。
关键是要放慢动作,以留出生成新扫描图像所需的时间。
1. 使ROV处于一种稳定的状态(坐底或者靠近底部)。
2. 选择开始360度极坐标扫描
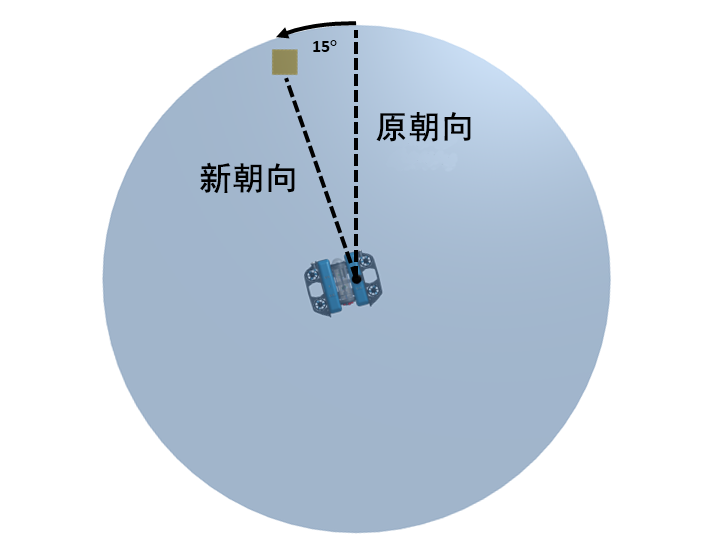
3. 确定于目标的相对方位
4. 转动ROV使目标移动至对准相对方位为零的位置
5. 选择扇区扫描,并将声呐的扇区扫描范围缩小到大约60-90度,以使用更快的刷新率。
6. 当ROV向前行驶时,用声呐保持对目标的追踪。