P30
P30 是一种单波束一维声呐,常作为高度计搭载在 BlueROV2/FindROV 等水下机器人上,用于测量ROV在水下时的实时离底高度。
菜单项
-
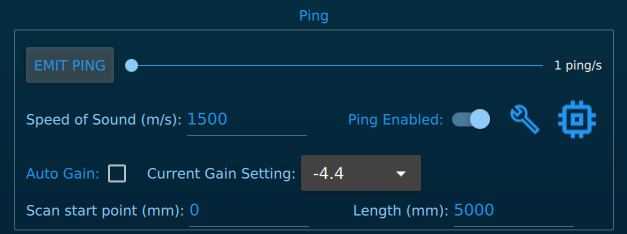
Emit Ping 启用连续传输:从设备请求单个配置文件数据,并停止连续传输配置文件数据(如果已激活)。
-
Ping Rate Slider 传输速率:设置连续传输数据速率,(实际更新速率可能稍慢)。
-
Speed of Sound 声速设置:用于距离计算的声音速度。在海水中应为1500 m/s,在淡水中应为1435 m/s。
-
Ping Enable 设备使能:使能 P30 的声波输出。设置为禁用时,P30 将不会从换能器发射声波。设置为启用时,即使没有数据在传输,也可能会发出声波进行后台操作。
高级设置
单击设备设置菜单上的扳手以访问这些高级设置
-
Auto Gain 自动增益 :启用自动增益和范围调整(建议的默认设置为“启用”)。
-
Gain Selection 增益选择 :手动增益控制(必须禁用自动模式)。调整设备的灵敏度;数字越大表示灵敏度越高。
-
Scan Range 扫描范围 :手动扫描范围选择(必须禁用自动模式)。手动选择扫描范围以进行数据输出和目标跟踪。有两个参数可调整扫描范围:
-
Scan Start 扫描开始 :距Ping设备换能器开始扫描的起始距离
-
Scan Length 扫描长度 :要扫描的总距离(从扫描开始到扫描结束的距离)