设备管理
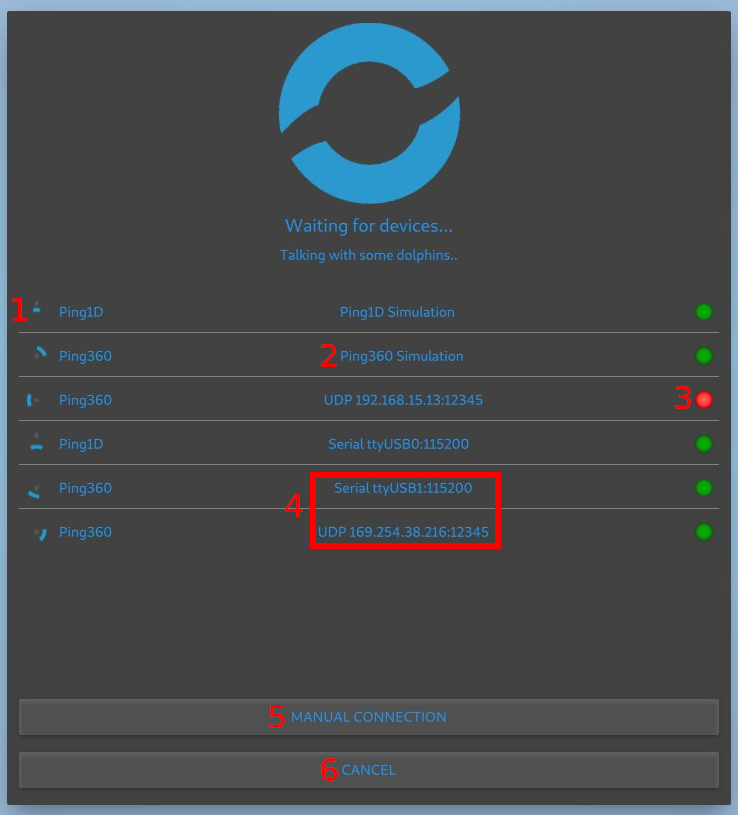
PingViewer自动扫描串行端口(COM)和UDP连接上的可用设备。如果检测到 P30 或 P360 ,则会显示可用的连接,并且用户能够在设备管理器中的可用设备之间进行选择。
Ping Viewer 尝试连接到IP地址为192.168.2.2的主机UDP端口9090(P30)和9092(P360)。这是在FindROV 或 BlueROV2 水下机器人上运行的默认IP地址。
设备管理
-
显示动画和可用传感器的名称。
-
说明可用连接的种类。
-
显示连接的可用性。
红色:连接不可用。
绿色:连接可用。
-
描述连接类型和连接配置。
-
允许用户转到“手动连接”。
-
取消并退出“设备管理器”。
手动连接
-
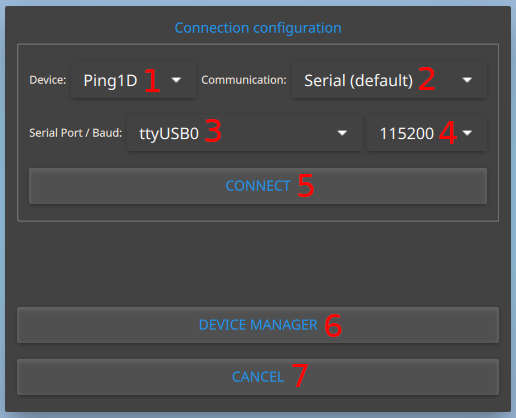
显示所有兼容的设备。
-
显示可用的连接类型。
-
列出所有可用的串行端口。
-
显示所选设备的有效波特率。
注意:如果设备使用自动波特率检测,则不会出现波特率列表。
-
连接已配置的设置。
-
返回至“设备管理器”菜单。
-
取消并退出“手动连接”。
连接类型
-
串行:选择串行端口(例如COM1或ttyUSB0)和波特率。
-
UDP:选择主机UDP服务器的IP地址和端口。
注意:要将应用程序连接到远程主机上的 P30 或 P360,可以使用bluerobotics-ping python 软件包中的 pingproxy 程序:
pip install --user bluerobotics-ping
python -m brping/pingproxy --device <device>
<device> 是连接 P30 或 P360 的串行端口(例如/dev/ttyUSB0)。