物理参数
| 深度等级 | 300m | |
| 工作温度范围 | 0-30 ℃ | |
| 空气中重量 (含电缆) | 187 g | |
| 水中重量 ( 含电缆 ) | 100g | |
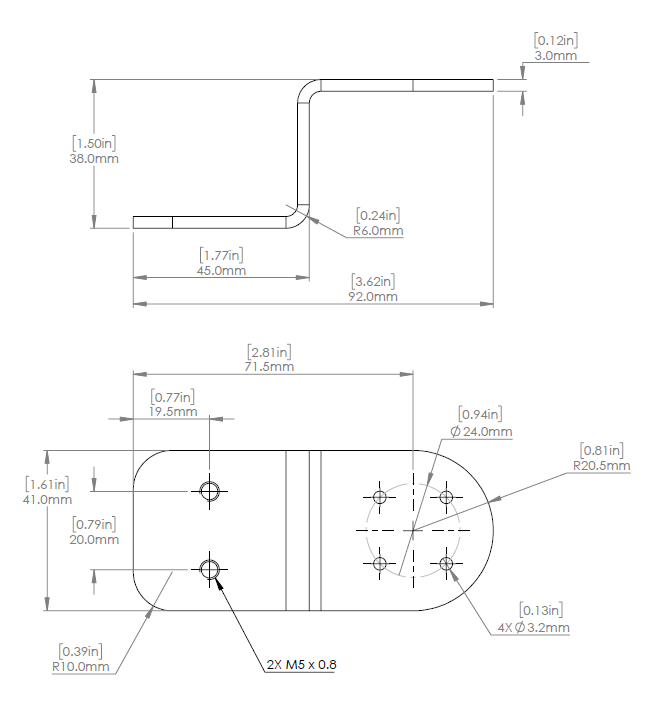
| 支架安装的螺母规格 | M5 × 1.6 mm |
电气参数
| 供电电压 | 4.5 - 5.5 V DC | |
| 通信协议 | UART 串口通信 | |
| 逻辑电平 | 3.3V(容忍5V) | |
| 功耗 | 100 mA(典型) | |
| 900 mA(峰值) |
线缆参数
| 直径 | 4.5 mm | |
| 长度 | 875 mm | |
| 外壳材质 | 黑色聚氨酯 | |
| 导体绝缘材质 | 聚丙烯 | |
| 导线规格 | 24 AWG | |
| 线序定义 | 红色 - Vin - 电源线 | |
| 黑色 - GND - 地线 | ||
| 绿色 - Rx - 数据接收 | ||
| 白色 - Tx - 数据发送 |
声学参数
| 频率 | 115 kHZ | |
| 声源等级 | 198 dB re 1 uPa @ 1 m | |
| 波束宽度(距峰值-3dB) | 25° | |
| 最小测距范围 | 0.3 m | |
| 典型测距范围 | 100 m | |
| 距离分辨率 | 0.5% 距离范围 | |
| 距离分辨率 @2m | 1 cm | 瀑布距离,不是测量距离 |
| 距离分辨率 @50m | 50 cm | 瀑布距离,不是测量距离 |
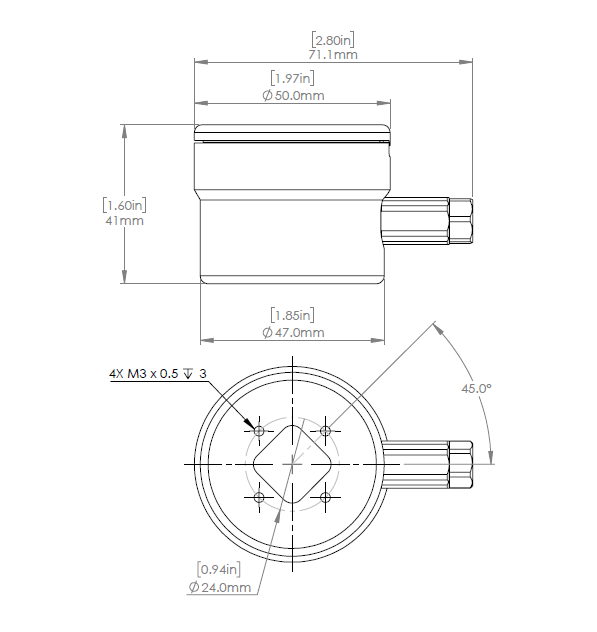
机械尺寸