介绍
声像和扫描声纳返回可能很难理解。本指南将有助于解释所显示的声纳图像以及将其安装在ROV上的一些最佳做法和技术。尽管在图示中使用了Ping360和BlueROV2,但是这些概念足够通用,可以应用于任何机械扫描声纳和ROV组合。
参考文献
- 菲利普·勃朗黛尔。2009年。《 Sidescan声纳手册》。英国奇切斯特:Praxis Publishing Ltd.
- 海底蓝图。2017年。“ Oculus M系列用户手册(英语)。” Oculus多波束声纳支持。上次修改时间为2017年3月30日。https: //www.blueprintsubsea.com/sys/download.php ? Id =oculus_mseries_manual_en。
- 克里斯·罗伯特和罗伯特·韦恩里(Robert Wernli Sr。),2014 年。ROV手册:《遥控车辆用户指南》。第二版。牛津:巴特沃思-海涅曼。
- DeepVision AB。2016年。“ 3.3海上侧扫声纳。”用户指南。http://deepvision.se/wp-content/uploads/2017/01/3.3-DeepView-SideScanSonaratSea.pdf。
工作原理
扫描声纳(声纳导航和测距)是一种有源声纳,其工作原理是将声音脉冲发送到水中并记录回声,当每个声音脉冲从其前面的物体反射回来时,回声将返回。
扫描声纳的进一步定义是具有“扇形”声束,该声束具有较宽的垂直束和较窄的水平束,用于获取环境的声横截面,然后将这些横截面作为单个图像显示在查看器上。
声音的速度
通过将水中的已知声速与接收回波的时间结合起来,声纳可以计算出声音传播的距离。用于确定距离的公式为:
距离=水中的已知声速*(回波返回的测量时间/ 2)
因此,声音速度的主要差异会影响到目标的准确范围。
通常,盐水中的声速约为1500m / s,但这会根据水温,盐度和声纳工作深度而变化。声音计算器的速度可用于获取不同操作条件下的更准确值。
尽管扫描声纳不具有自动计算声速的功能,但可以在查看器中针对合适的条件更改该值。

在Ping-Viewer中设置声音速度
目标反射率
具有与水不同的材料密度的目标(例如气体,岩石,混凝土或金属)将具有很高的反射率并具有强烈的回声。来自泥浆,淤泥,沙子和植物等材料的回声将具有较弱的回声,因为它们的密度与水相似或吸收声能。
回声的强度作为调色板上的明亮指示显示在查看器上。
在典型的调色板中,较深的颜色用于较弱的回声,而较亮的颜色用于较强的回声。
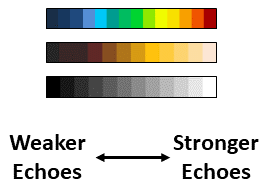
典型的扫描声纳调色板
下图的声纳图像显示了垂直悬挂的编织绳如何比周围的水亮,因为它的密度(小于)与海水不同。
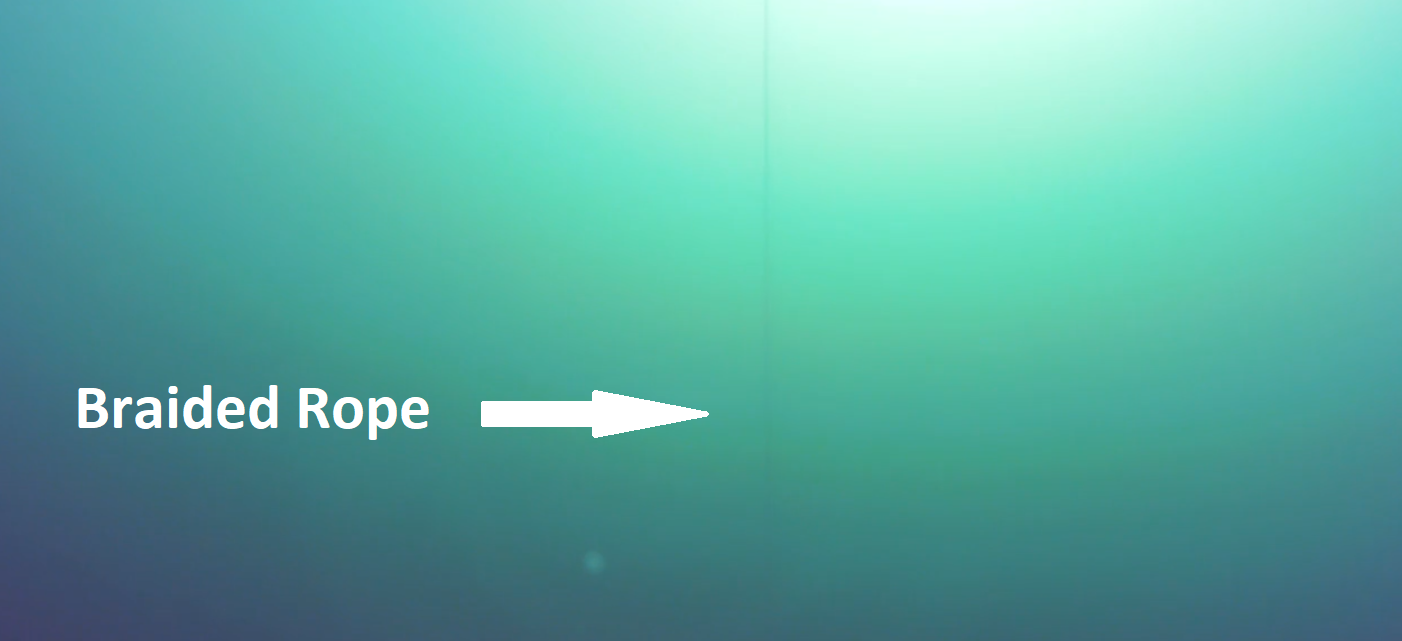
低能见度水中垂直绳索的ROV视图
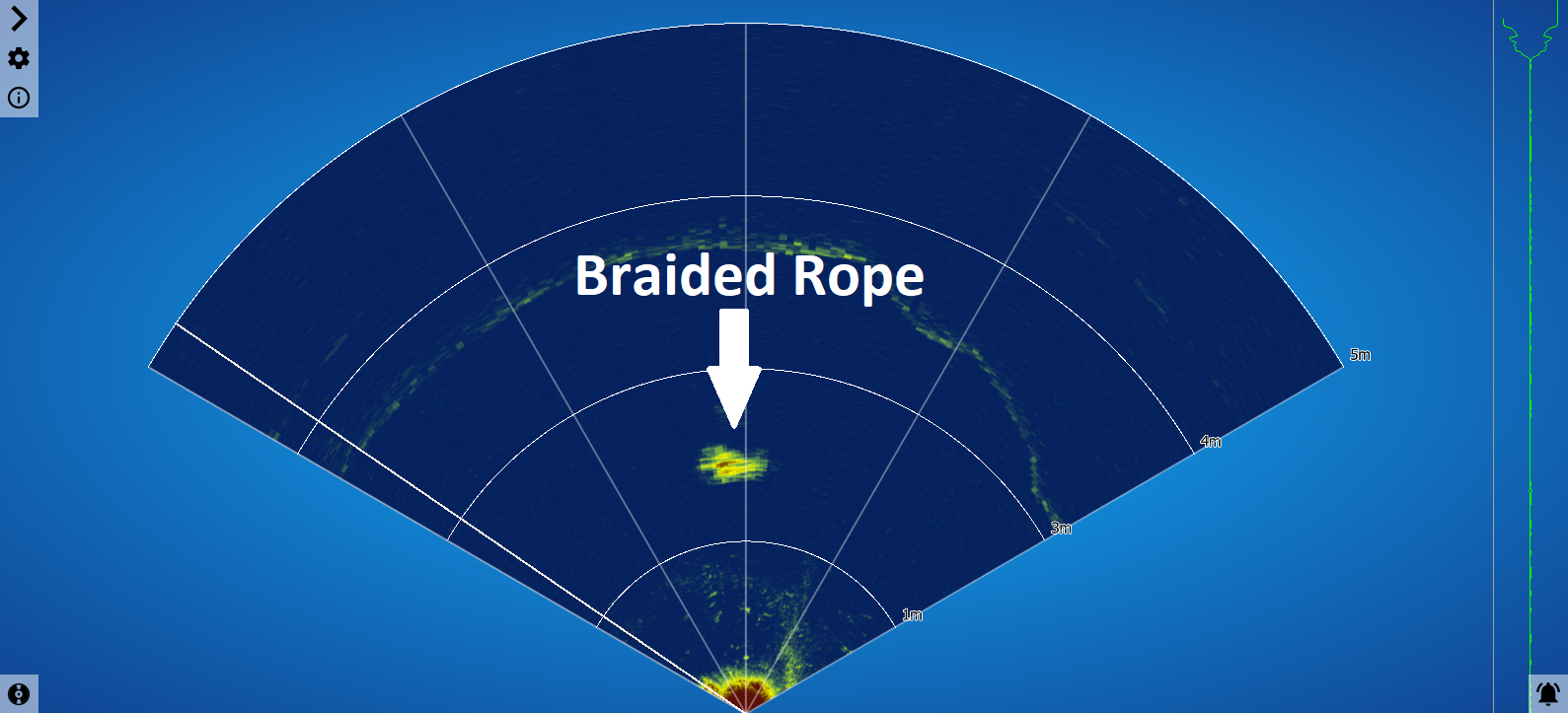
绳索的扇区扫描(自上而下的透视图,显示绳索为点)
声束图
在想象扫描声纳如何在声学上工作时,通常将它们与在黑暗区域中闪光的手电筒进行比较。用户只能看到手电筒光束照射的区域,其余区域保持黑暗。
与光束相比,扫描声纳的声束具有固定的宽度和高度,称为水平和垂直波束图。正是这种声束以声能而不是可见光能“照亮”了周围的水下区域。
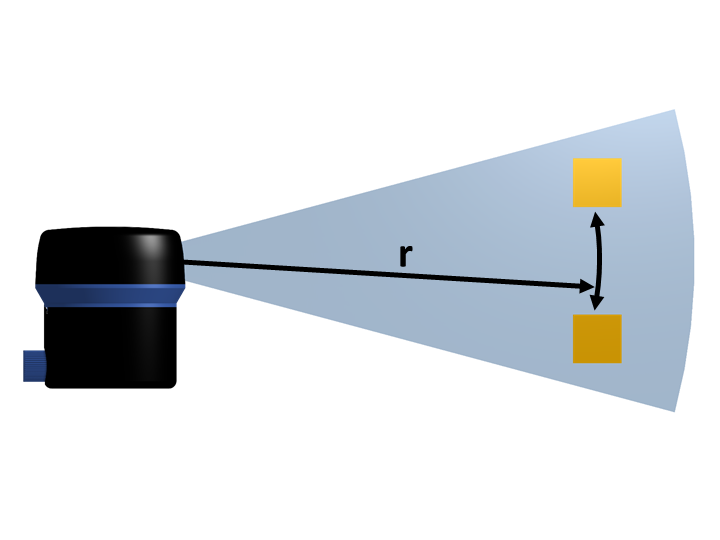
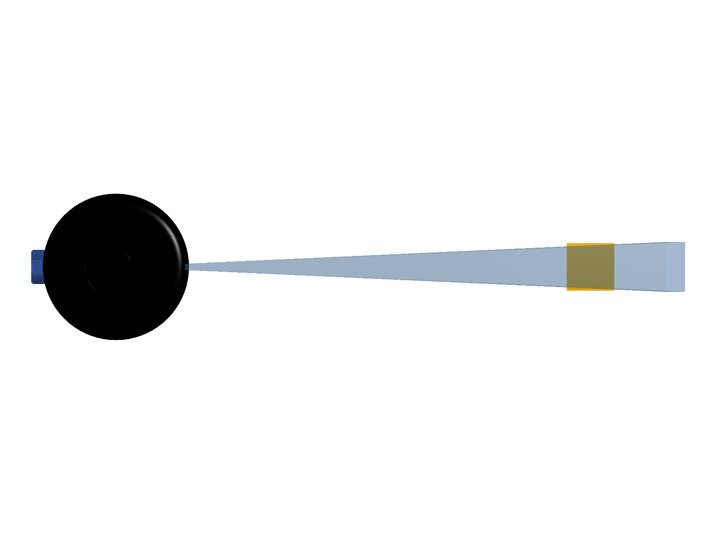
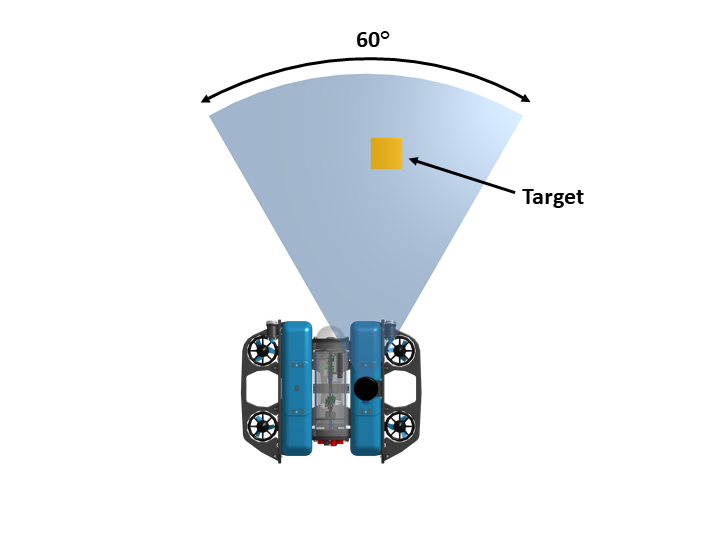
扫描声纳通常具有较宽的垂直光束和较窄的水平光束,以在换能器前面产生较窄的“切片”。
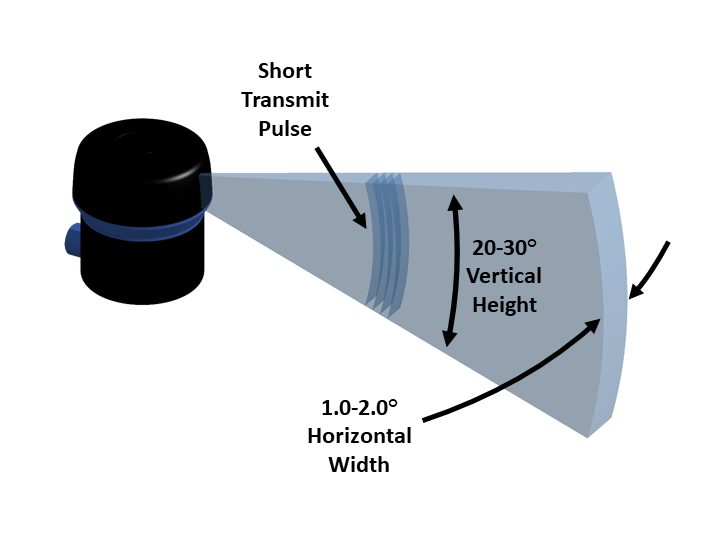
用于扫描声纳的典型扇形光束
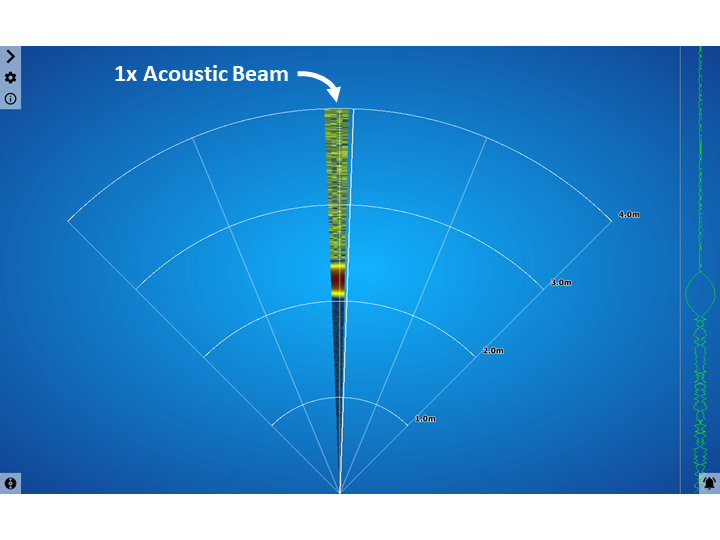
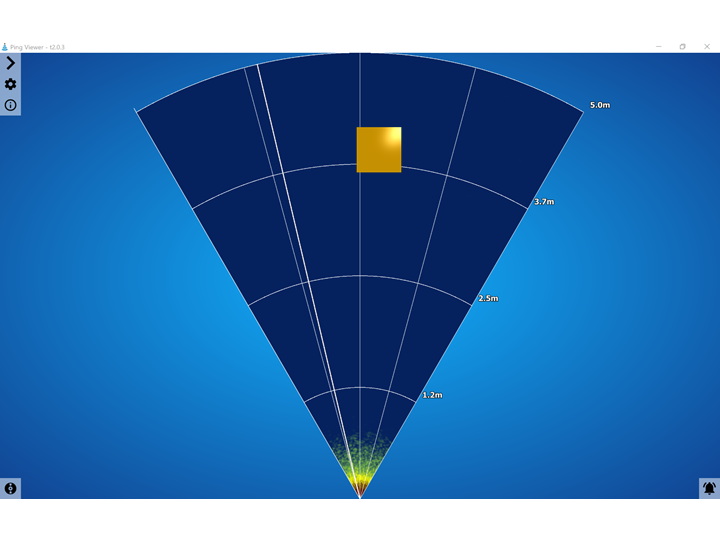
声纳显示显示一个光束“切片”
要“绘制”图像或定位目标,扫描声纳内部的换能器头会通过步进电机进行机械旋转,并将其旋转成弧形,以将“切片”堆积到显示软件上的图像中。
想像一下手电筒的类比,就像照相机在手电筒光束扫过某个区域时拍摄快照一样。用手电筒的窄光束,用户将无法一次看到所有事物,但是通过相机构建图像将使用户可以像全景图像一样将整个区域视为单个图像。
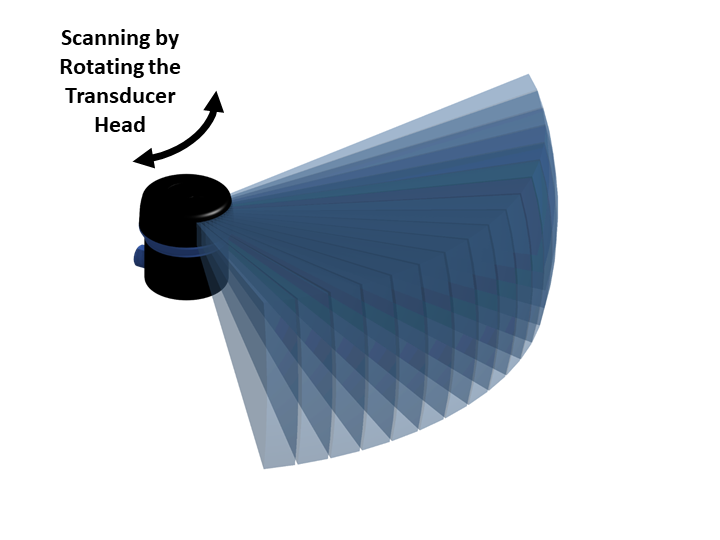
机械旋转声纳传感器
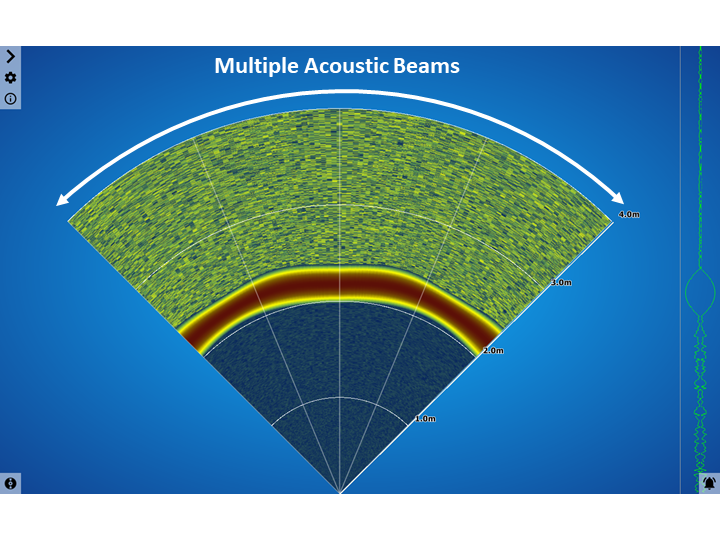
多个声纳束形成“扫描”
目标能见度
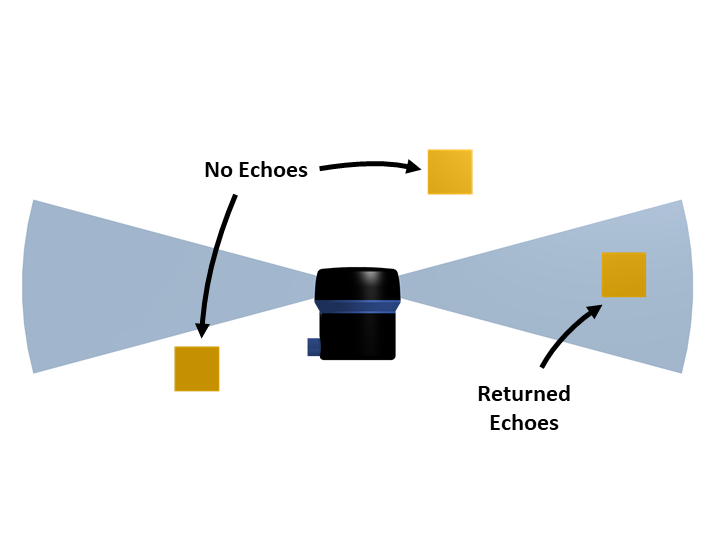
声纳水平和垂直波束方向图内的目标将被声学“照亮”,其回声将被反射回声纳以被接收并解释为图像。
光束图案之外的目标(上方,水平范围以下)将不会显示在查看器显示屏上。
垂直到达角和倾斜范围
扫描声纳无法区分具有相同垂直到达角(也称为“倾斜范围”)的物体(Blondel 2009、15和37-38)。这意味着,如果两个目标位于声纳的前面,并且彼此垂直在同一范围内,则声纳会将这两个目标显示为一个由其回声组合而成的单个结果。
查看海底
使用手电筒束的类比,并了解到扫描声纳无法区分不同高度的目标,则可以将显示器上显示的声纳图像视为该区域的“自顶向下”视图。
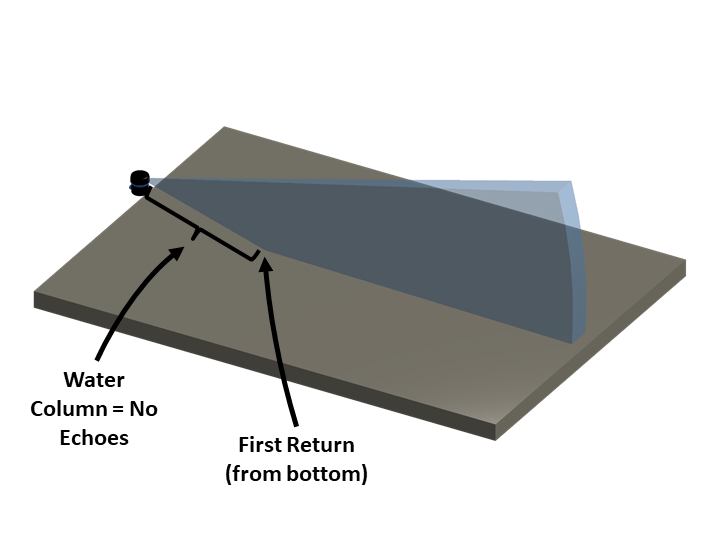
扇形声纳束与平坦底部相交
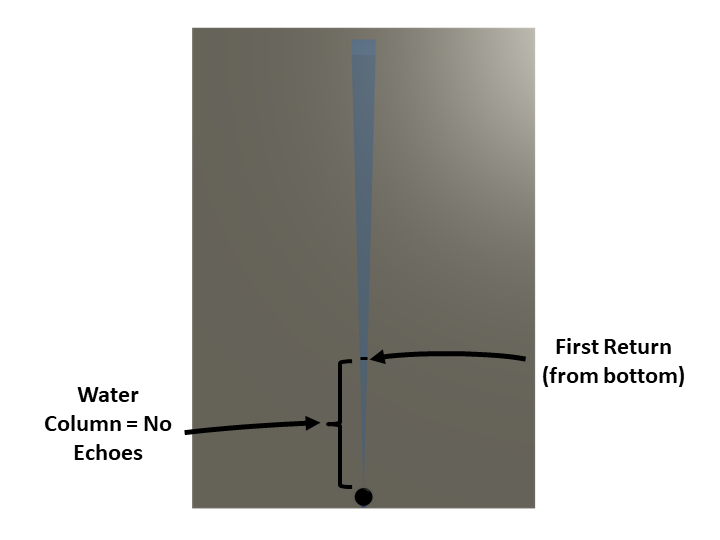
生成的自上而下的视图,如显示屏所示
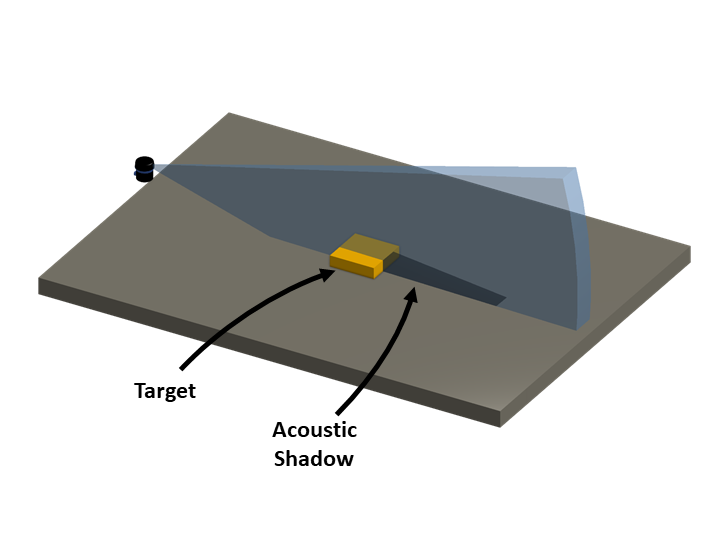
扇形声纳束与平坦的底部和目标相交
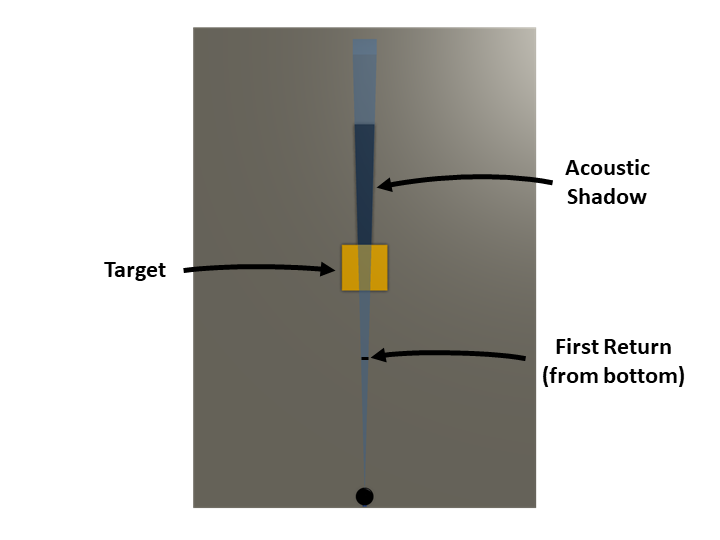
生成的自上而下的视图,如显示屏所示
底部可见度
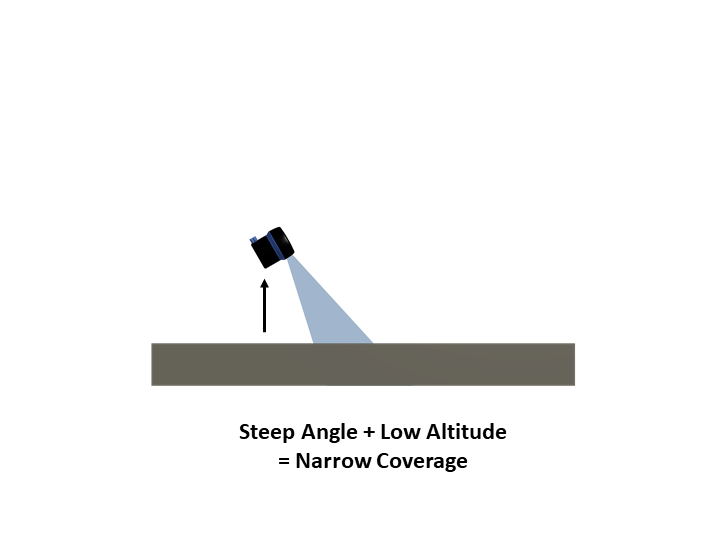
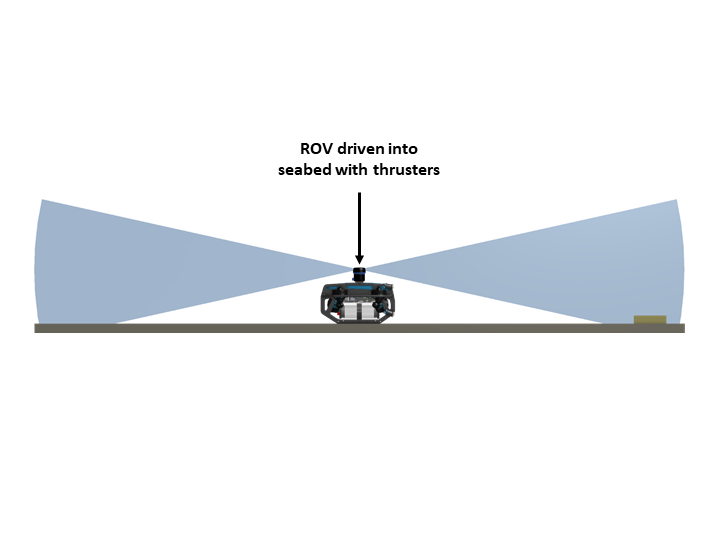
对于搜索海底并知道信号强度在进一步范围下降的用户,可以按一定角度安装扫描声纳,以便可以在显示器上照亮并看到不同数量的海底。
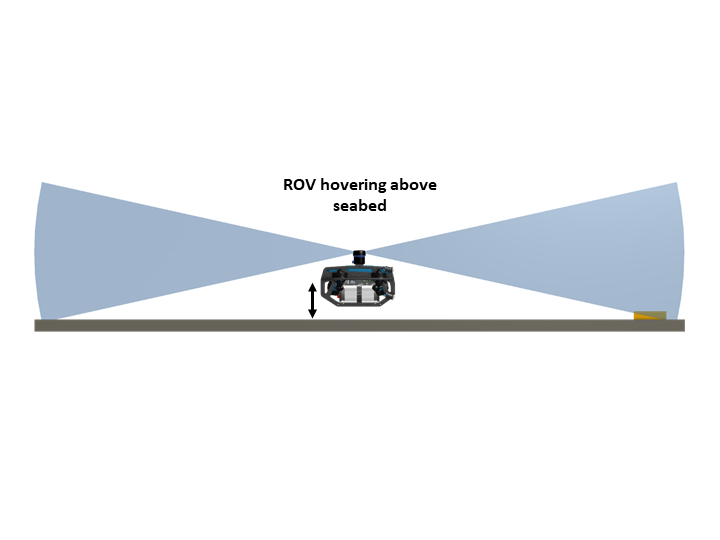
如果声纳高度低且向下倾斜角度较大,则仅显示总面积的一小部分。通过增加高度,声纳可以照亮更宽的海底。
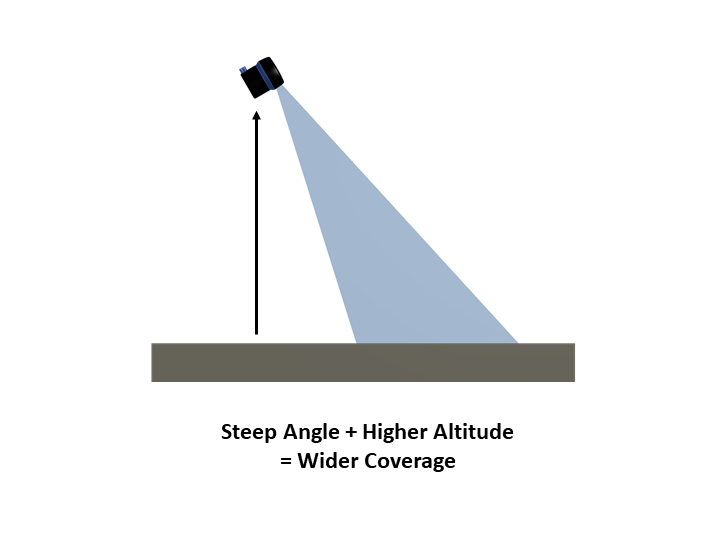
当操作员在海底寻找目标时,声纳的最佳用途是在海底上方的高度与声纳稍微向下倾斜之间取得平衡。这将为声纳的信号强度提供最长的底部成像范围。
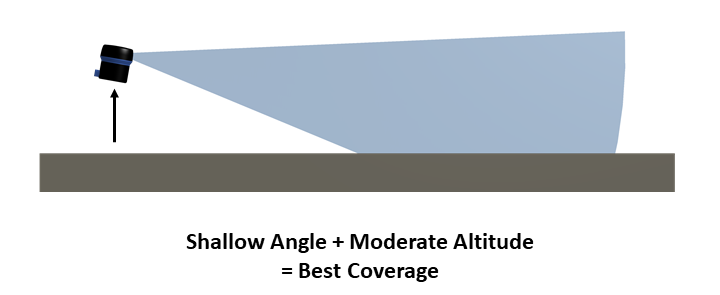
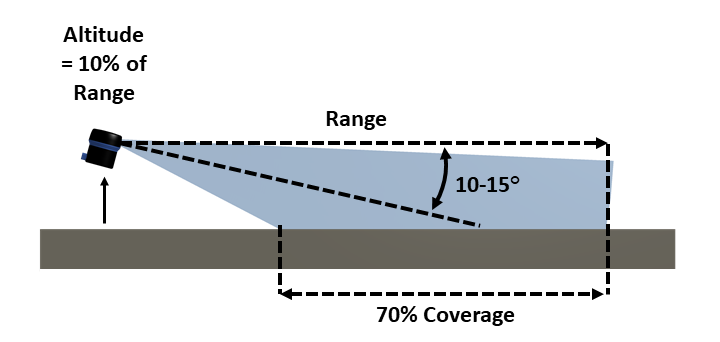
10%规则
一般而言,如果扫描声纳具有10-15°的下倾角和10%的工作范围高度,则扫描声纳(侧扫和机械扫描)可以实现给定区域的海床覆盖率约70%(DeepVision AB, 12)(海底蓝图,17)。例如,在10m的范围内,声纳的海拔高度应比海底高1m。在20m的范围内,声纳的高度应为2m。
声影
当声纳将目标定位在海底时,可以继续使用手电筒类比,以帮助确定高度,形状和方向。“声影”将显示在被照明目标的后面,就像“可见光影”将在被手电筒照亮的对象后面可见一样。
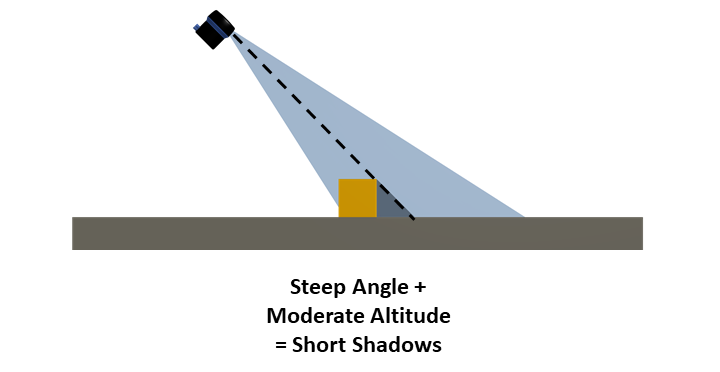
高度
如果声纳具有较高的高度和陡峭的下倾角,则声影将很短。短时的声音阴影有时很难看清,并使目标评估更加困难。
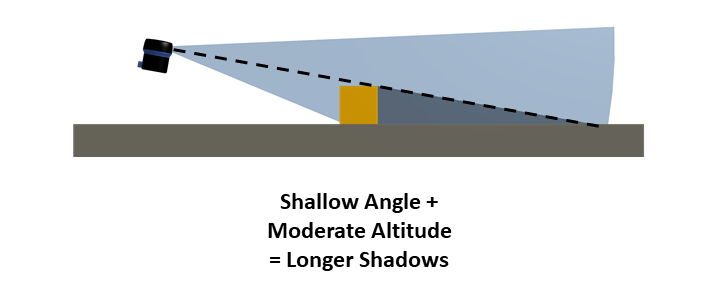
如果声纳的高度接近底部且下角更浅,则目标投射的声影会更长,从而易于解释。
距离
根据声纳束的角度几何形状,由较远的目标投射的声影将相对狭窄。当声纳移近目标时,声影宽度将增加。对于较宽的阴影,可能没有声音阴影中的其他目标,因为没有声音信号照亮它们。
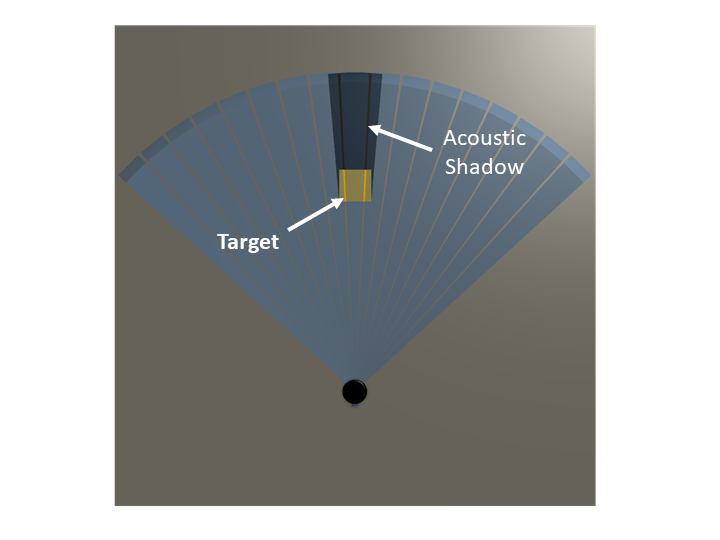
较远的目标产生的狭窄阴影
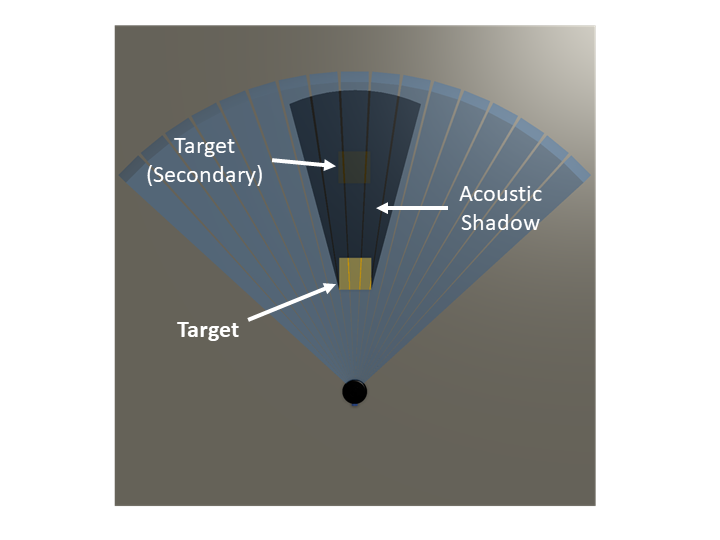
较接近声纳的目标产生的较宽阴影,使次要目标模糊当多个目标位于相同的一般区域中并被阴影隐藏时,增加高度并向下倾斜声纳以产生较短的阴影可能会产生更好的目标区分。
了解回声
如前几节所述,通过扫描声纳从侧面照亮目标。因此,仅最接近声纳的边缘或表面将被照亮。
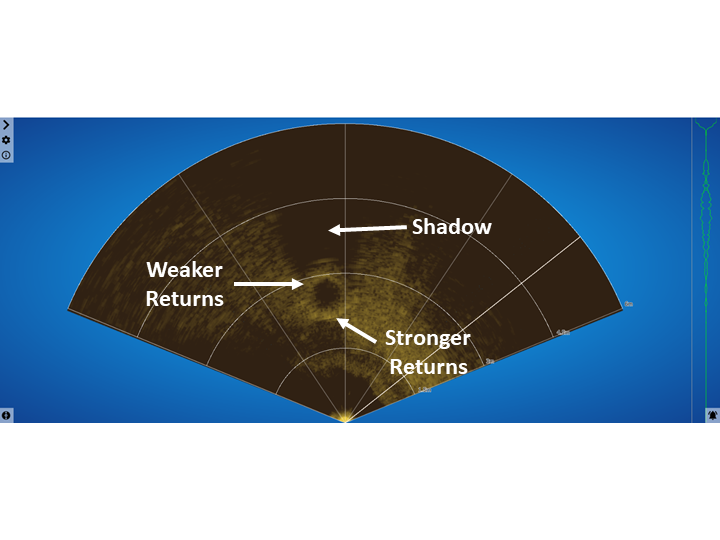
垂直于声纳的目标表面将产生最强的回波,而其他角度的表面将导致声波从声纳反射离开,从而产生较弱的回波。
来自目标的回声
下方位于底部的轮胎的声纳图像显示,最靠近声纳的轮胎边缘如何产生最亮的回声,而朝上的轮胎表面的回声较弱。
通过使用“ 10%法则”并在稍微向下倾斜的同时提高声纳的高度,可能会创建2.5维图像,并照亮目标的顶部和顶部。2.5D图像比照亮最接近声纳的表面更容易解释。
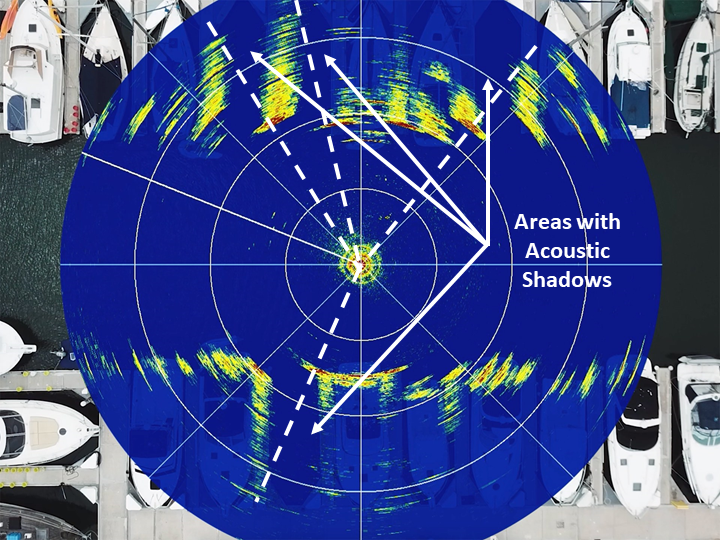
来自环境的回声
这些相同的声学原理也适用于较大的环境。下图显示了水中的各种码头指和船体。声纳在“视线”范围内的演出具有明亮的回报。退货后面被遮盖的区域显示为阴影或“无退货”区域。
带扫描声纳的ROV导航
即使具有独特的声像解释功能,将声纳扫描仪安装到ROV上也可以成为重要的导航工具。没有扫描声纳,ROV飞行员必须依靠通过摄像机视觉解释的目标和特征。在低能见度条件下,能见度可能会受到严格限制,范围可能小于一米。
扫描声纳可扩大目标的定位范围。与其停留在海床上上方或目视寻找目标,不如保持静止或坐在海底并完全扫描周围区域,通常会更有用。飞行员可以获得相对自然的或人造的特征,潜在的目标,或消除不感兴趣的区域。
由于小型ROV的质量较低,因此在水柱中操作时,在垂直或水平面上的意外移动都很常见。为了扫描声纳,当换能器头绕其中心点轴旋转(或步进)时,会生成图像。如果在允许完全生成图像之前,通过飞行员输入或环境因素移动ROV,则会发生“图像拖尾”。这会使图像图变形,并使图像几乎无法解释。
在这些情况下,最好将ROV轻轻地放在底部或缩小扇区扫描范围,以使刷新速率更快,并使ROV绕其轴旋转。
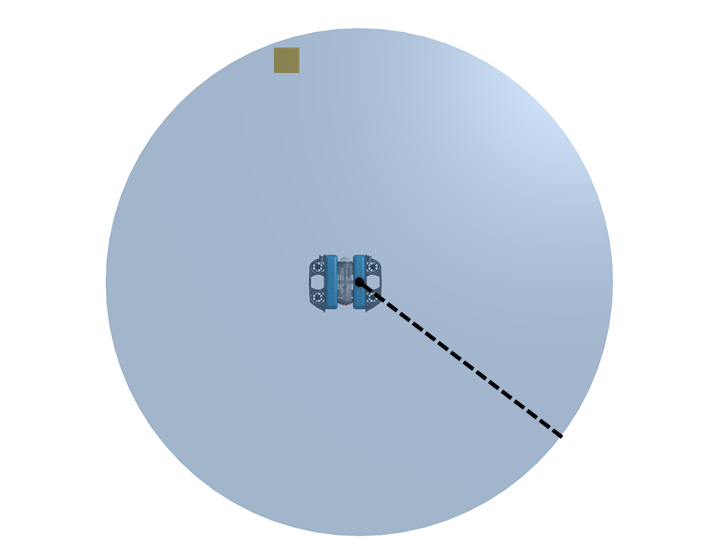
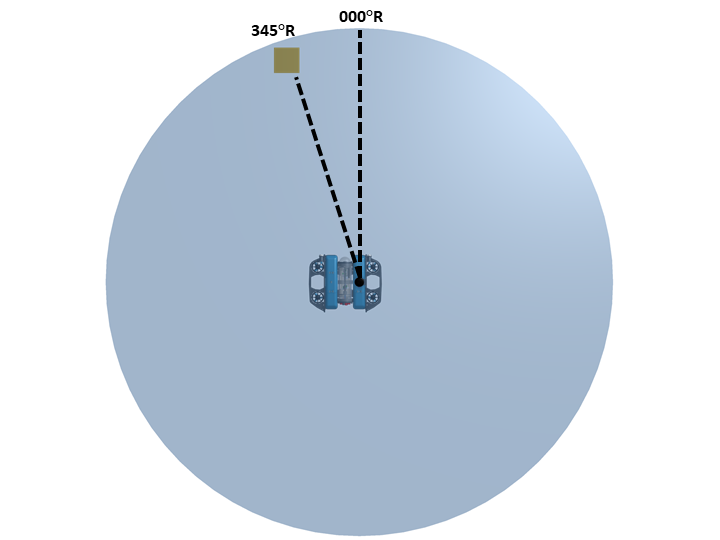
相对轴承
重要的是要注意,在观看声纳时,观察者与目标的角度被认为是“相对方位角”,其中目标从直线前方(000°R)读取为顺时针角度。有关相对方位的更多信息可以在此 Wikipedia文章中找到。
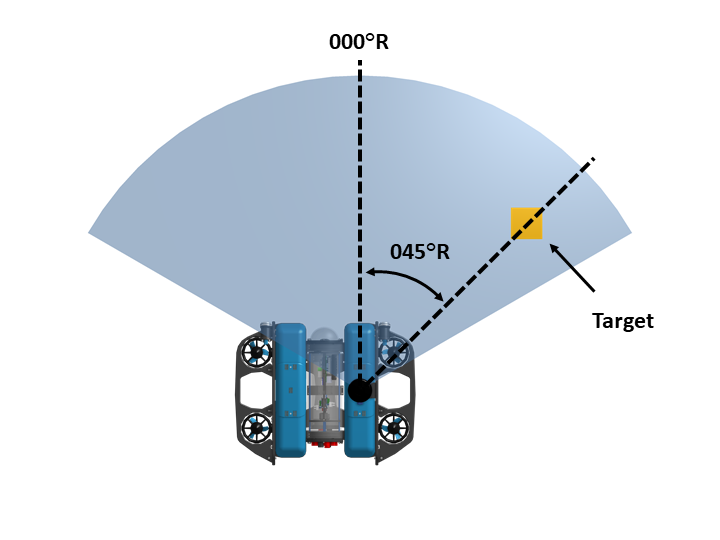
ROV对目标的相对方位
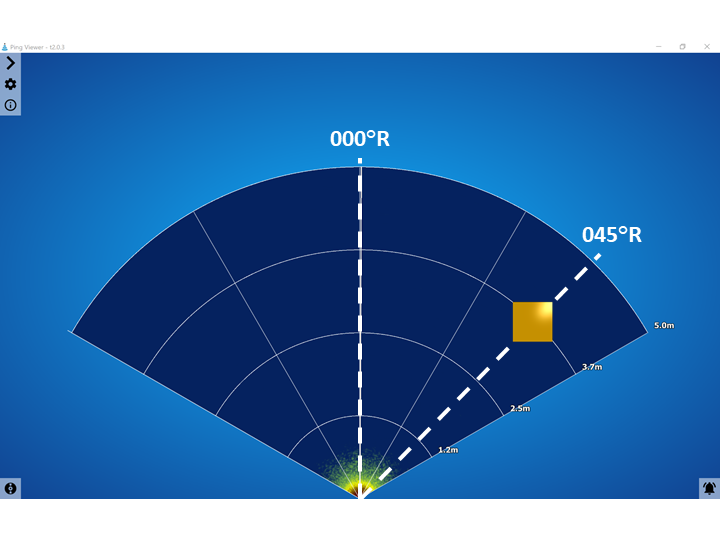
声纳查看器上显示的相对方位
极性扫描
连续360度的任何扫描都称为“极性扫描”。
极性扫描对于在低能见度条件下提高ROV周围的态势感知很有用。相机通常具有狭窄的视野(约90°),除非在可旋转的云台上,否则无法环视四周或侧面。极性扫描对于了解ROV侧面或后面可能有用。
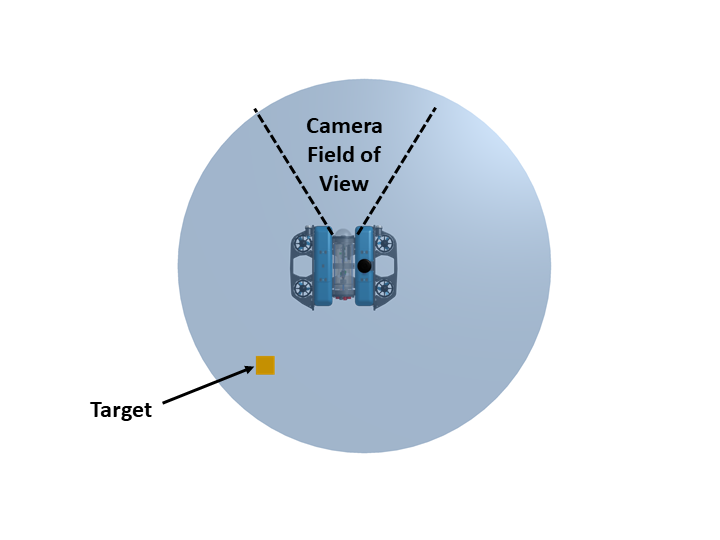
Polar Scan在ROV后面定位目标
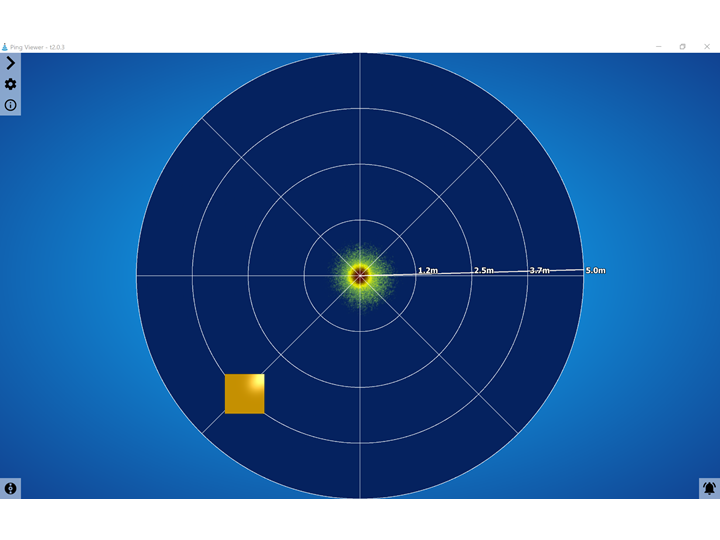
极地扫描,如查看器所示
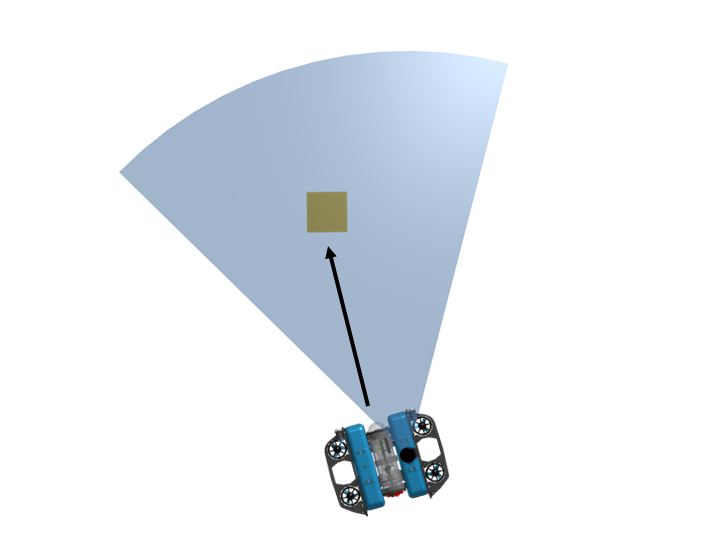
部门扫描
任何小于360度的声纳扫描都称为“扇区扫描”。
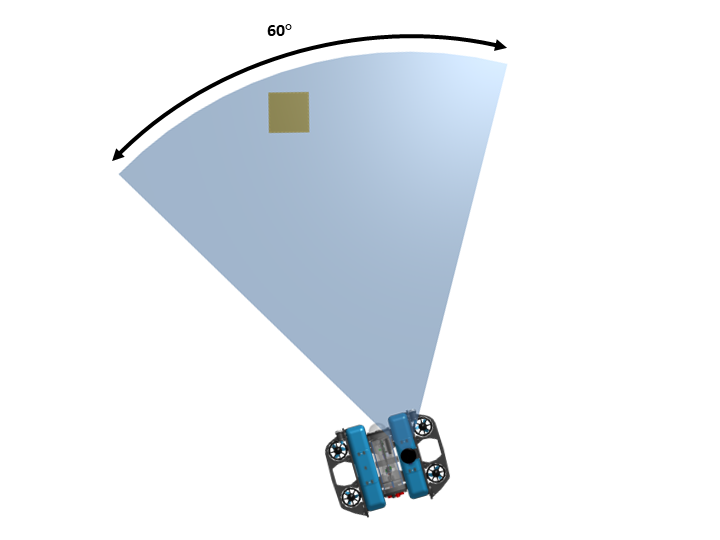
扇区扫描对于在对目标成像时提高扫描刷新率或在移动时跟踪目标很有用。扇区扫描的缺点是丢失了ROV侧面或后面的图像。
扫描宽度减少到60度
声纳显示器上显示的扇区扫描
装有ROV的扫描声纳可定位目标
除了用于导航目的之外,将目标定位在海底或水柱上是扫描声纳的另一种用途。
学习如何使用扫描声纳查找目标将需要一些实践,因为较小的目标比较大的目标更难定位和识别。
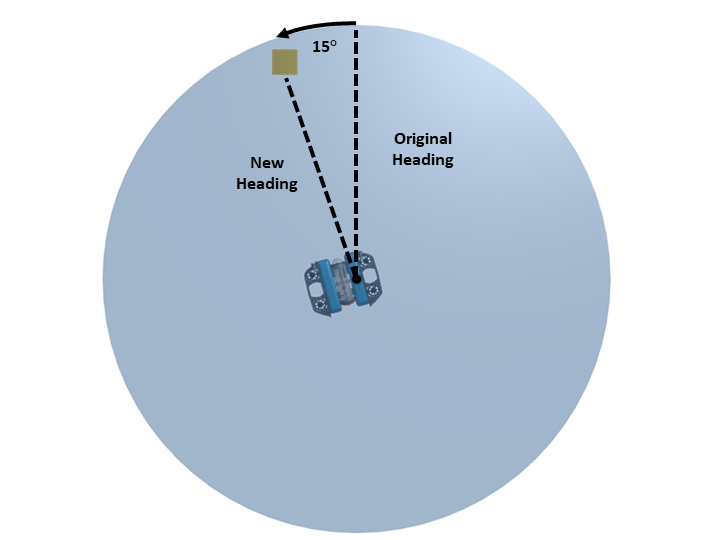
关键是要机动并缓慢转动,以留出时间来生成新图像。
1.将ROV放在底部或底部附近的非常稳定的位置。
2.允许生成360度极性扫描。
3.确定目标的相对方位。
4.旋转ROV以将目标对准零相对方位。
5.将声纳的扇区扫描范围缩小到大约60-90度,以利用更快的刷新率。
6.车辆向前行驶时,与声纳上的目标保持接触。
其他技术
扫描声纳有很多应用程序!如果您碰巧知道更多或正在与一个人做一个很棒的项目,请随时在我们的论坛上写一篇简短的文章,让我们知道您的经历。