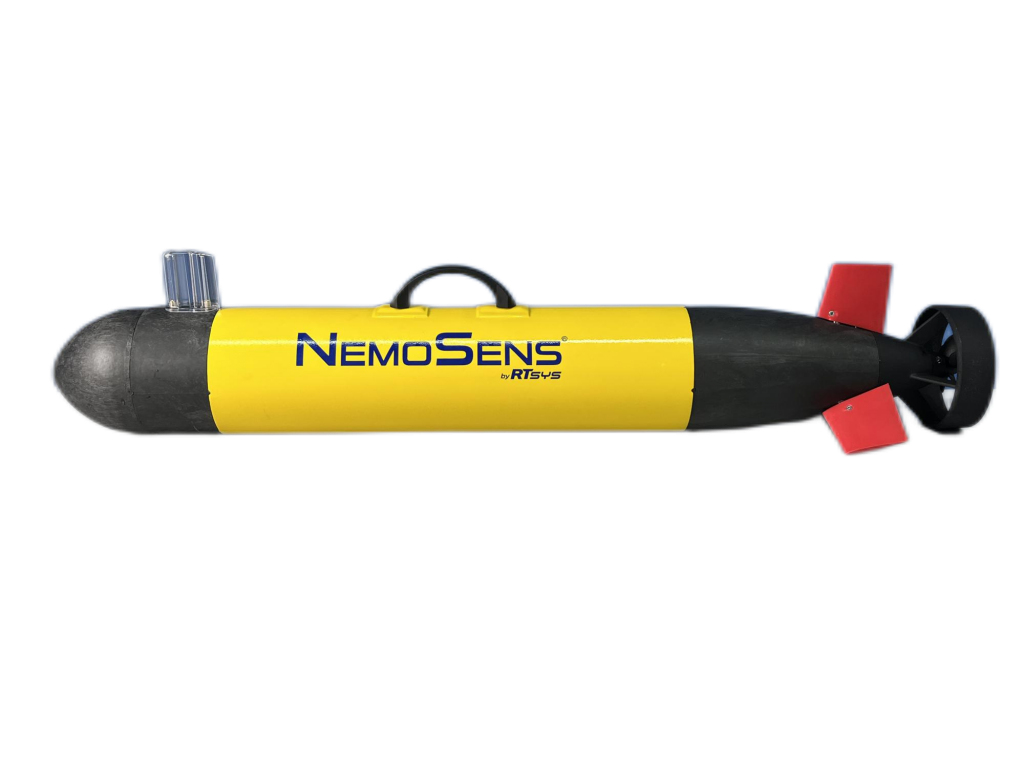
NemoSens AUV
小巧便捷的开放式自主水下机器人
NemoSens AUV 是一款小型自主水下航行器(AUV),专为科学和工业应用设计!它具有轻量级、高性价比、开放式Linux架构的特点,允许用户开发自己的导航算法,使用更加灵活充分!
水下自主探索新纪元
FindAUV 是一款小型自主水下航行器(AUV),专为科学和工业应用设计!
小巧便捷的产品设计、强大的性能、超高的性价比和开放的Linux架构,正在帮助越来越多的人探索海洋!

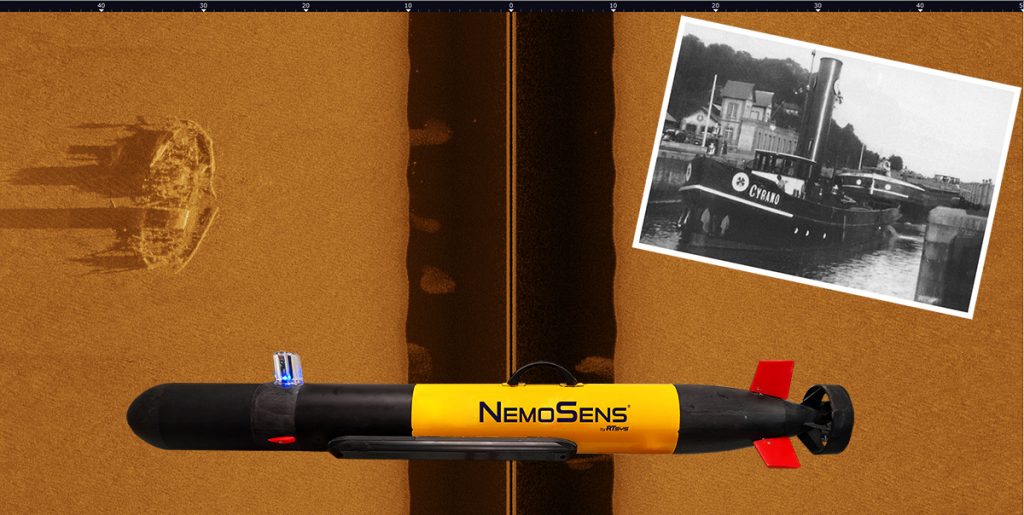
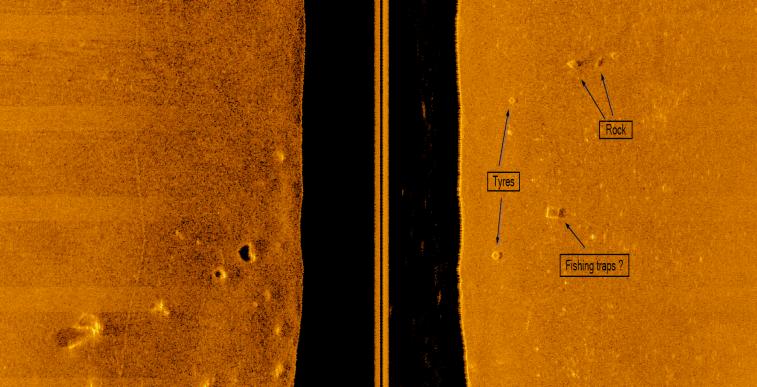
海底声学成像
Seabed Acoustic Imaging

水质监测
Water Quality Monitoring
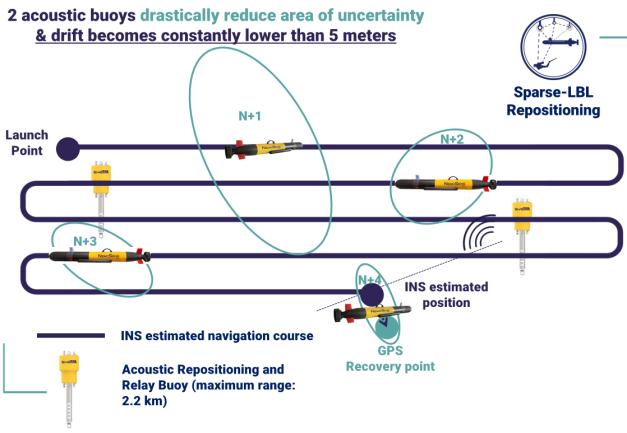
LBL 远距离通信
Sparse- LBL Communication

水下探索利器

高达300米的水深作业能力
FindAUV深度等级高达300m,基本覆盖全部常用水深,无论是科研探索,还是水下考古等各种应用领域,都可以轻松驾驭!

开放式Linux架构
FindAUV是一个灵活开放的系统,具有一个Linux操作系统(支持MOOS-IVP或者ROS),满足各种开发需求的理想平台。

支持群组模式
可实现多达7个NemoAUV在群组模式下共同操作和通信!
易部署,易回收
NemoAUV是一种单人便携式AUV,不需要特殊的安装,即开即用。它的操作(下水和回收)可以很容易地在船上或海边进行。
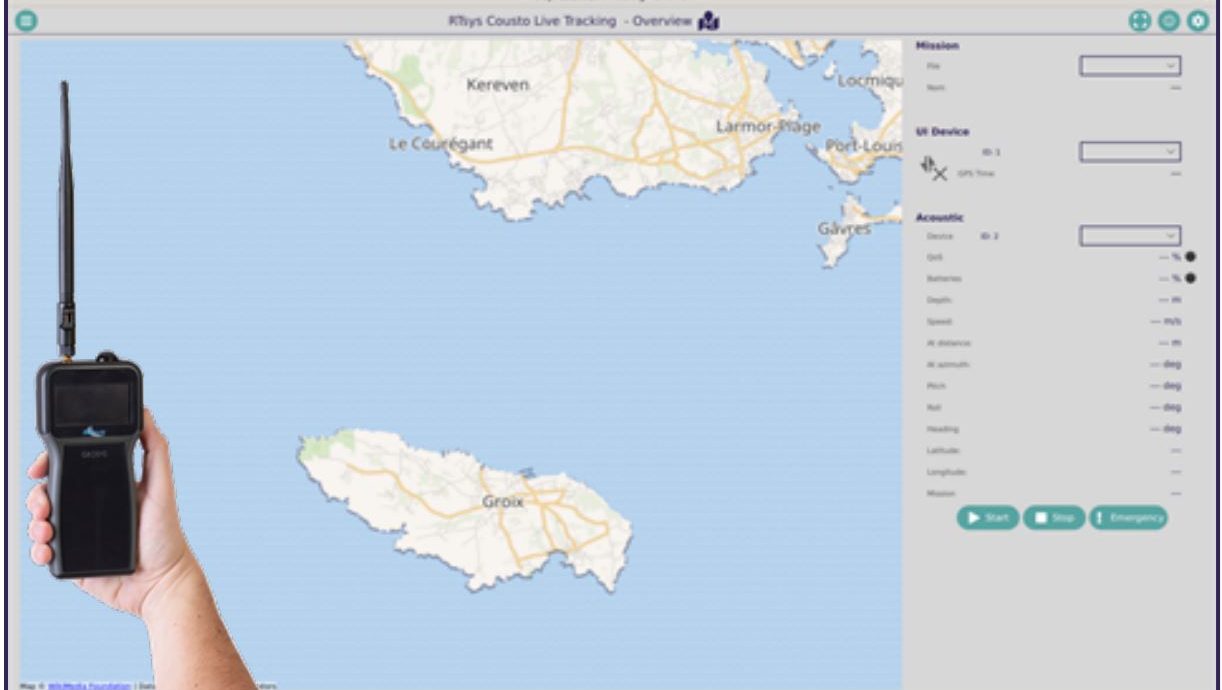
实时路径跟踪
NemoAUV在水声通信设备的作用下,在执行任务期间是可以被跟踪。
小巧便捷,性能超高
NemoAUV全长不到0.9m,运动速度可达2~8节,可支持超过10小时的续航,可适用高达4级的海况,是水下探索的利器!
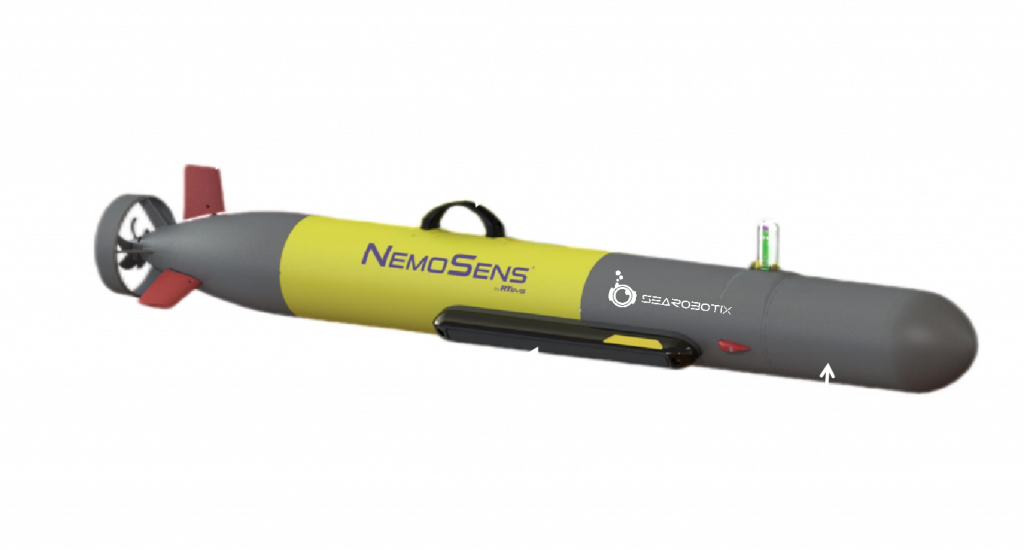
定制专属AUV
可选组件
长基线水下定位系统LBL
可用于AUV重定位,提高AUV定位导航的精度,降低漂移误差
水面通信单元Surface Communication Module
用于与AUV水下实时通信,可实现实时路径跟踪以及实时获取AUV参数
超高频定位系统Geosys UHF
方便操作员搜索和定位AUV,还可用于发送任务终止等基本命令
可选负载
侧扫声呐Side Scan Sonar
可用于探测海底地貌和水下物体
多普勒计程仪DVL
可用于测量离底高度、AUV相对水底的运动速度、以及定位导航、路径规划等
高度计Single Beam Echosounder
可用于测量离底高度
温盐深传感器RBR Legato CTD
可测量AUV所处环境的温度、盐度以及深度等
水下彩色高清摄像头 L3C-AHD
可用于水下观察摄影
多参数探测仪 AML-3
AML-3多参数测量仪既可自容也可实时传输,可直接安装3个传感器,通过外接最多可集成5个传感器,可选声速、电导率温度传感器、压力、浊度等传感器。
磁力计 APS1540
可测量磁场强度,为AUV提供更精确的方位






水下探索,即刻展开
NemoAUV 一款小巧便携的高性能开放式自主水下机器人!