ROV的框架材料
框架材料为HDPE,俗称高密度聚乙烯,密度比水略小,韧性较好。
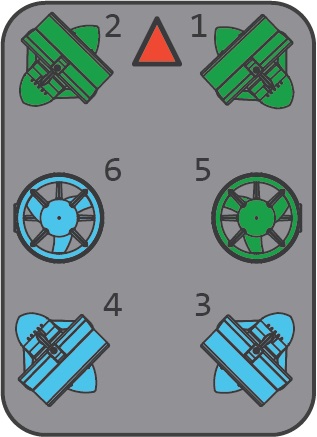
BlueROV2 Standard推进器框架结构
ROV常见连接问题
1. 检查ROV线缆连接、供电是否正常。 2. 查看对应网口连接是否正常,IP是否已修改,是否存在数据传输。 3. 若有数据传输则需要检查是否允许QGC通过Windows防火墙。 4. QGC安装路径改为纯英文,尽量不要出现字符或空格。 5. 检查电脑驱动是否安装,建议安装驱动精灵自动检查。
ROV静止时,罗盘出现漂移现象
可能原因:罗盘未校准或校准失败;Pixhawk内部磁力计可能受到了外界环境的影响。 查看及解决方法:给ROV上电,等待10分钟以确保传感器预热。确保将INS_GYR_CAL参数值设置为“从不”。执行加速计校准,再进行罗盘校准,最后重启ROV。
解锁状态下,推进器不转
可能原因:处于推进器测试模式;ROV框架类型测试错误。 查看及解决方法: 1. 确认手柄是否完成校准,且映射正常。 2. 查看ROV框架类型是否设置正确。 3. 查看是否已关闭推进器测试模式。
解锁后推进器立即开始转动
可能原因:游戏手柄是新的,未经过校准。 解决方法:进行手柄校准。
接入游戏手柄后,无法控制ROV
可能原因:游戏手柄是新的,未经过校准;未启用游戏手柄输入。 解决方法:参考用户手册,在启用游戏手柄输入前复选框打√。
ROV姿态保持不变
可能原因:ROV中途连接中断过,这是QGC软件的一个问题,连接中断后未重启将会出现IMU显示异常的现象。 解决方法:重启QGC。
定深失败
1. 确认手柄是否完成校准,且手柄键位映射正常。 2. 确认下水前是否完成深度传感器校准。