机械参数
| Bravo 2 | Bravo 3 | Bravo 5 | Bravo 7 | |
| 空气中净重 | 2.8kg | 4kg | 7.5kg | 9.5kg |
| 水中净重 | 1.6kg | 2.6kg | 4kg | 4.5kg |
| 外壳材质 | 铝6061 | 铝6061 | 铝6061 | 铝6061 |
| 深度等级 | 450m | 450m | 450m | 450m |
| 工作温度 | -10~+35℃ | -10~+35℃ | -10~+35℃ | -10~+35℃ |
电气参数
| Bravo 2 | Bravo 3 | Bravo 5 | Bravo 7 | |
| 供电电压 | 24~48VDC | 24~48VDC | 20~48VDC | 20~48VDC |
| 额定功率 (10kg负载) | 60W | 60W | 200W | 200W |
| 峰值功率 (10kg负载) | / | 150W | 300W | 300W |
| 通信方式 | RS232/RS485/以太网Ethernet | RS232/RS485/以太网Ethernet | RS232/RS485/以太网Ethernet | RS232/RS485/以太网Ethernet |
性能参数
| Bravo 2 | Bravo 3 | Bravo 5 | Bravo 7 | |
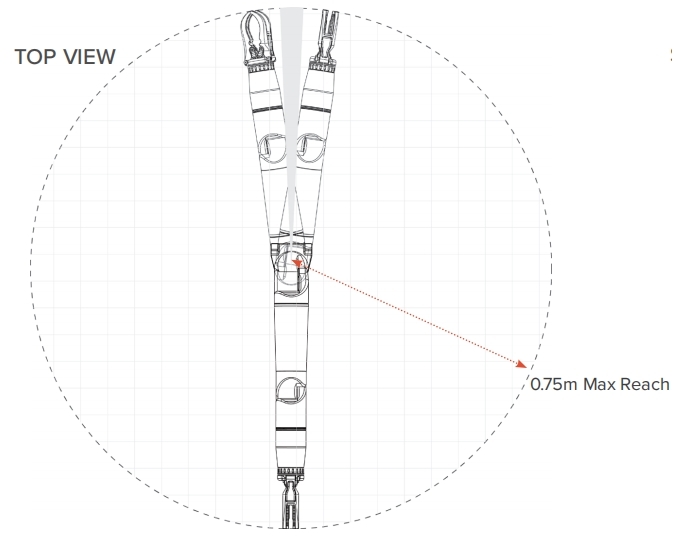
| 最大行程 | / | 0.41m | 0.7m | 0.7m |
| 全伸展提升能力 | / | / | 12kg | 10kg |
| 最大提升能力 | / | 15kg | 20kg | 20kg |
| 关节速度 | 45°/s | / | 85°/s | 85°/s |
| 控制精度 | 0.1° | <1cm | <1cm | <1cm |
| 抓力 | 50kg | 50kg | 700N | 700N |
| 控制模式 ( 可选 ) | 位置Position、速度Velocity | 位置Position、速度Velocity | 位置Position、速度Velocity | 位置Position、速度Velocity |
| 控制方式 ( 可选 ) | 3D鼠标、手柄、软件GUI界面、MA系列主从模拟器 | 3D鼠标、手柄、软件GUI界面、MA系列主从模拟器 | 3D鼠标、手柄、软件GUI界面、MA系列主从模拟器 | 3D鼠标、手柄、软件GUI界面、MA系列主从模拟器 |
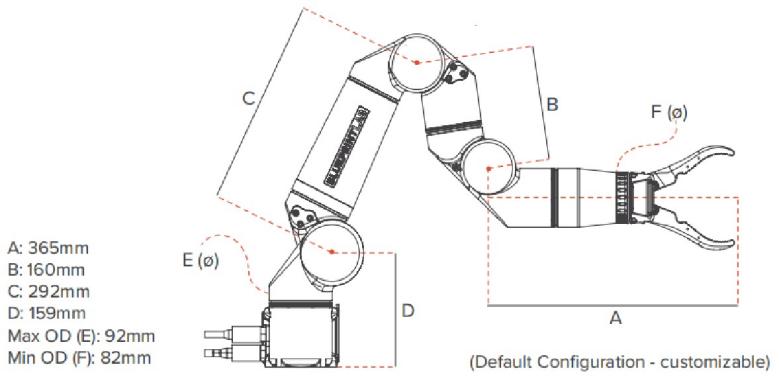
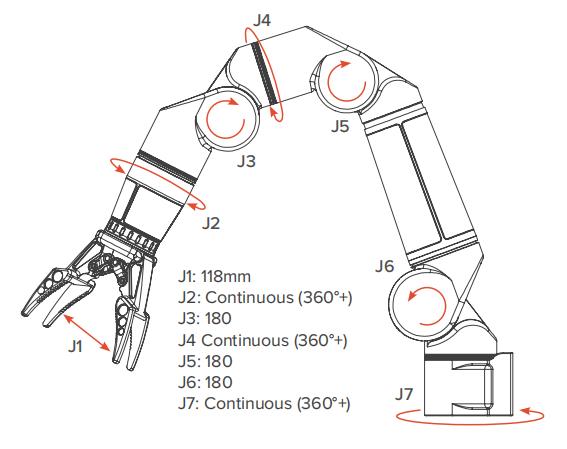
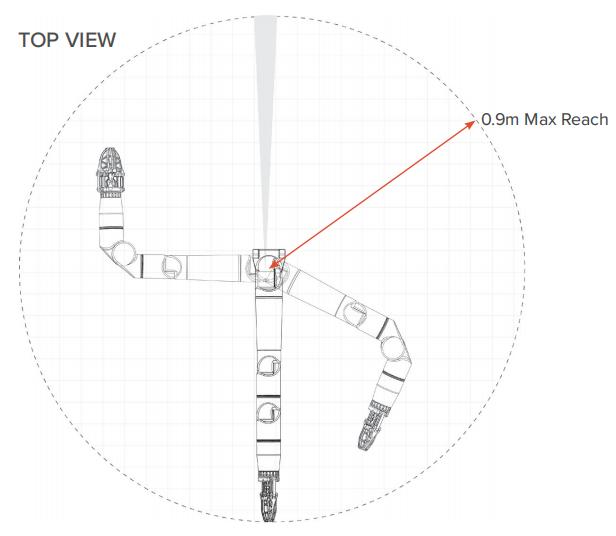
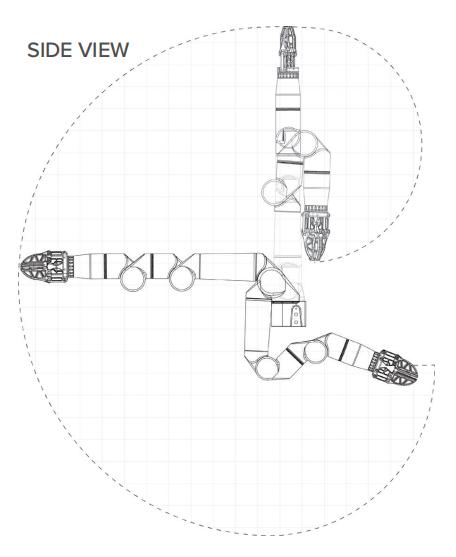
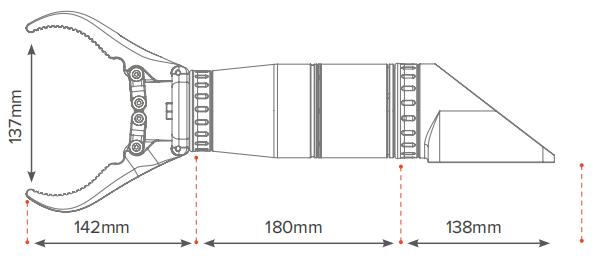
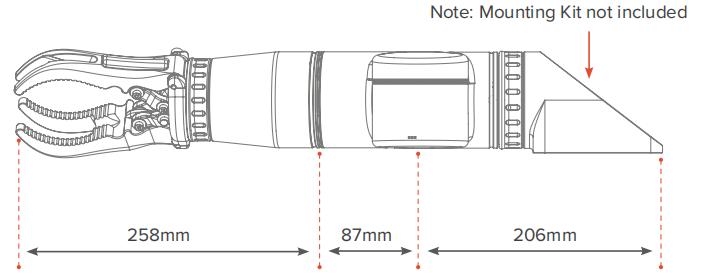
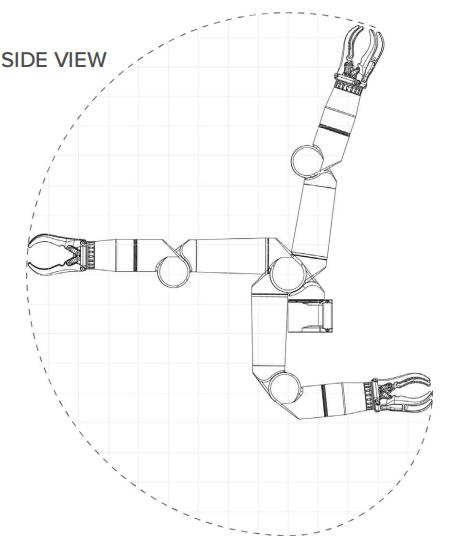
机械尺寸
Bravo 2

Bravo 3
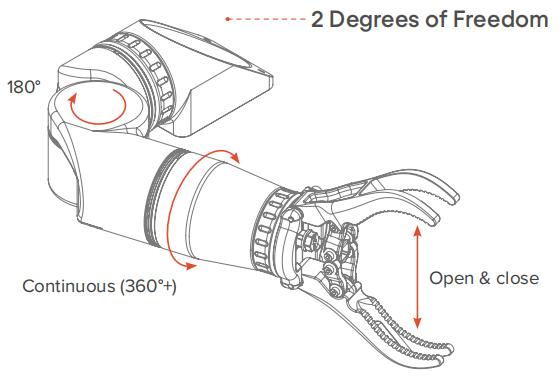

Bravo 5

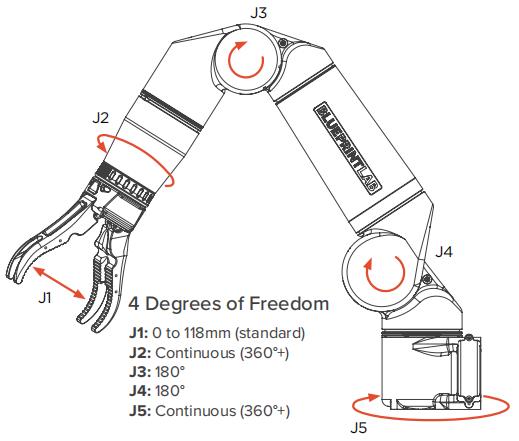
Bravo 7