
BlueTrac Series
Ultra‑Short Baseline
Global Miniature High‑Performance USBL
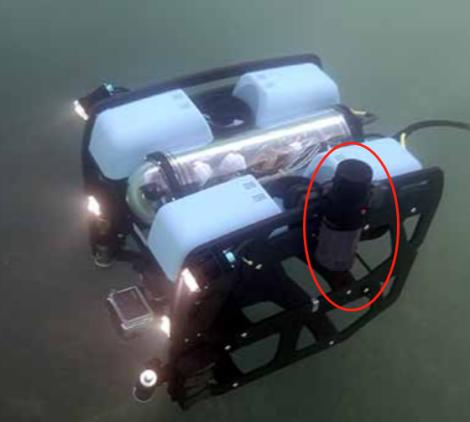
BlueTrac USBL is an ultra‑short baseline (USBL) underwater positioning system composed of hydroacoustic communication‑positioning software, a USBL beacon (AX310), and a transponder beacon (AM311). Compact and portable, it offers a communication range exceeding 1,000 meters, supports simultaneous tracking of multiple underwater beacon targets, enables two‑way digital communication, and is applicable for positioning, navigation, and real‑time monitoring of underwater platforms such as ROVs and AUVs.

Integrated Communication‑Positioning Design
High Positioning Accuracy

High Portability
Multi‑Target Tracking

Low Power Consumption
BlueTrac USBL Product Overview
The compact USBL system consists of hydroacoustic communication‑positioning software, a USBL base station (AX310), and USBL beacons (AM311). The base station can simultaneously track the positions of multiple USBL beacons while enabling two‑way data communication. The beacons feature built‑in batteries and low‑power listening circuits, supporting long‑term standby operation underwater. The system is widely applicable in:
-ROV positioning and navigation tasks;
-AUV navigation, telemetry, and real‑time position tracking;
-Remote control and positioning of sensors and equipment;
-Diver position monitoring and search guidance.

Diverse components, freely configurable
The Preferred Choice for Underwater Communication & Positioning!
BlueTrac USBL
Positioning & Navigation Working Principle
Acoustic Interrogation‑Response
The surface unit transmits encoded acoustic "interrogation" signals, and the underwater transponder receives and returns "response" signals, establishing two‑way communication.
Time‑of‑Flight Ranging
The target slant range is calculated based on the round‑trip signal time and the speed of sound (approximately 1,500 m/s), with coding techniques employed to resist noise interference.
Array Direction‑Finding
The surface ultra‑short baseline (USBL) transducer array (multiple receivers) detects minute time/phase differences in signal arrival to determine azimuth and elevation angles.
3D Positioning
By combining slant‑range and angle data, the system calculates three‑dimensional coordinates relative to the surface unit. These coordinates are then fused with GPS and attitude data to derive a global position.
Environmental Calibration
Dynamically corrects sound‑speed variations (due to temperature, salinity, and depth) and suppresses multipath reflection interference, thereby enhancing positioning accuracy.

Communication & Positioning — Launching Now
BlueTrac USBL integrates underwater communication, positioning, and navigation functions into one compact system, making it ideally suited for small to medium‑sized underwater robots.