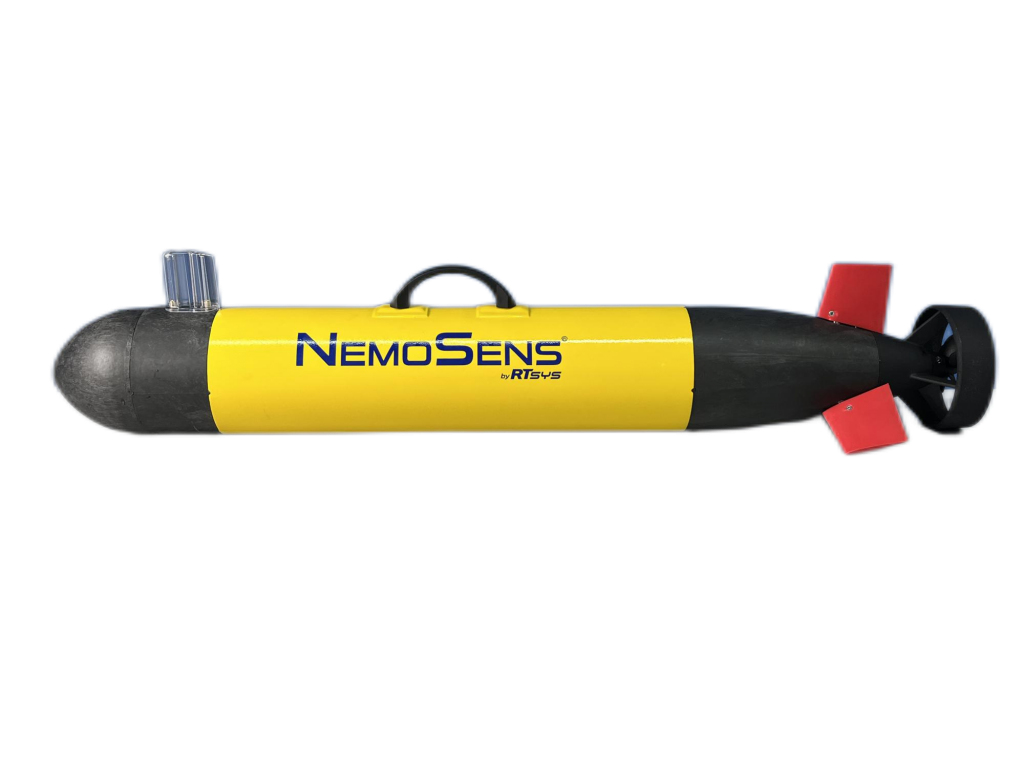
NemoSens AUV
Compact and User-Friendly Open-Frame AUV
NemoSens AUV is a compact Autonomous Underwater Vehicle (AUV) designed for scientific and industrial applications.
It features a lightweight design, cost-effective performance, and an open Linux-based architecture that allows users to develop custom navigation algorithms for greater flexibility and control.
Empowering Exploration with Open Innovation
NemoSens AUV is a compact Autonomous Underwater Vehicle (AUV) designed for scientific and industrial applications.
Its portable design, powerful performance, outstanding cost-effectiveness, and open Linux architecture are enabling more and more users to explore the ocean with ease and flexibility.

海底声学成像
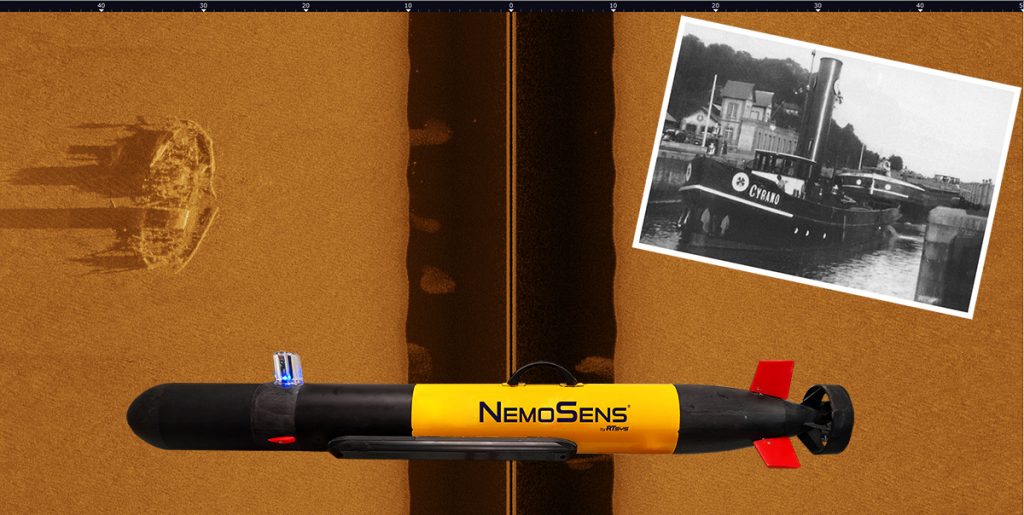
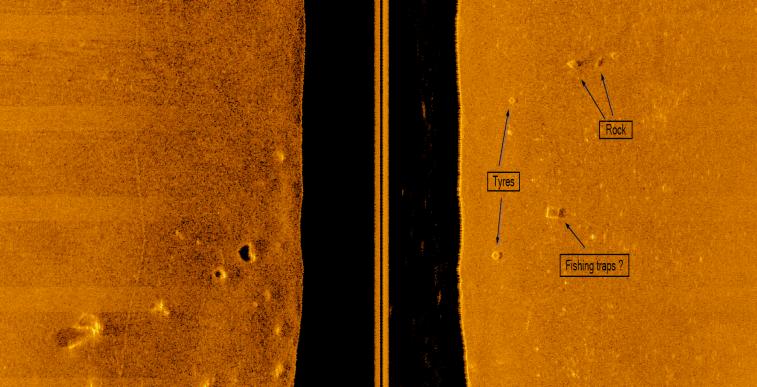
Seabed Acoustic Imaging

水质监测
Water Quality Monitoring
LBL 远距离通信
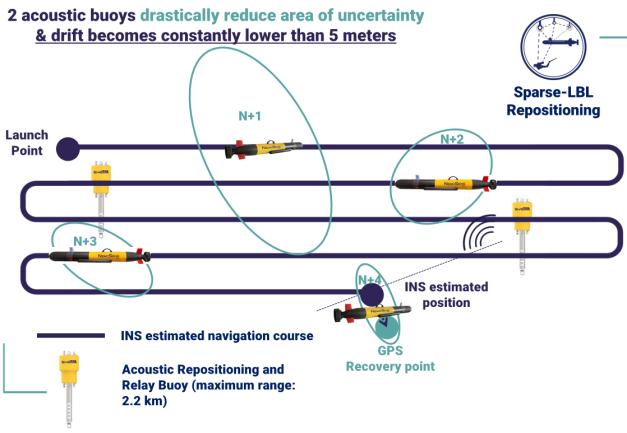
Sparse- LBL Communication

Explore the Depths with Power

Rated for 300m Depth Operations
NemoAUV supports underwater operations up to 300 meters, covering virtually all common depth requirements. Whether for scientific research, underwater archaeology, or various industry applications, it performs with ease and reliability.

Open Linux Architecture
NemoAUV is built on a flexible, open system with a Linux-based operating system, supporting MOOS-IvP or ROS. It's the ideal platform for custom development and advanced autonomy research.

Group Operation Supported
NemoAUV enables coordinated missions with up to 7 NemoAUVs working in group mode, allowing simultaneous operation and communication.
Easy Deployment & Retrieval
Designed as a single-operator portable AUV, NemoAUV requires no special setup—simply power on and deploy. Launch and recovery can be easily performed from boats or shoreside locations.
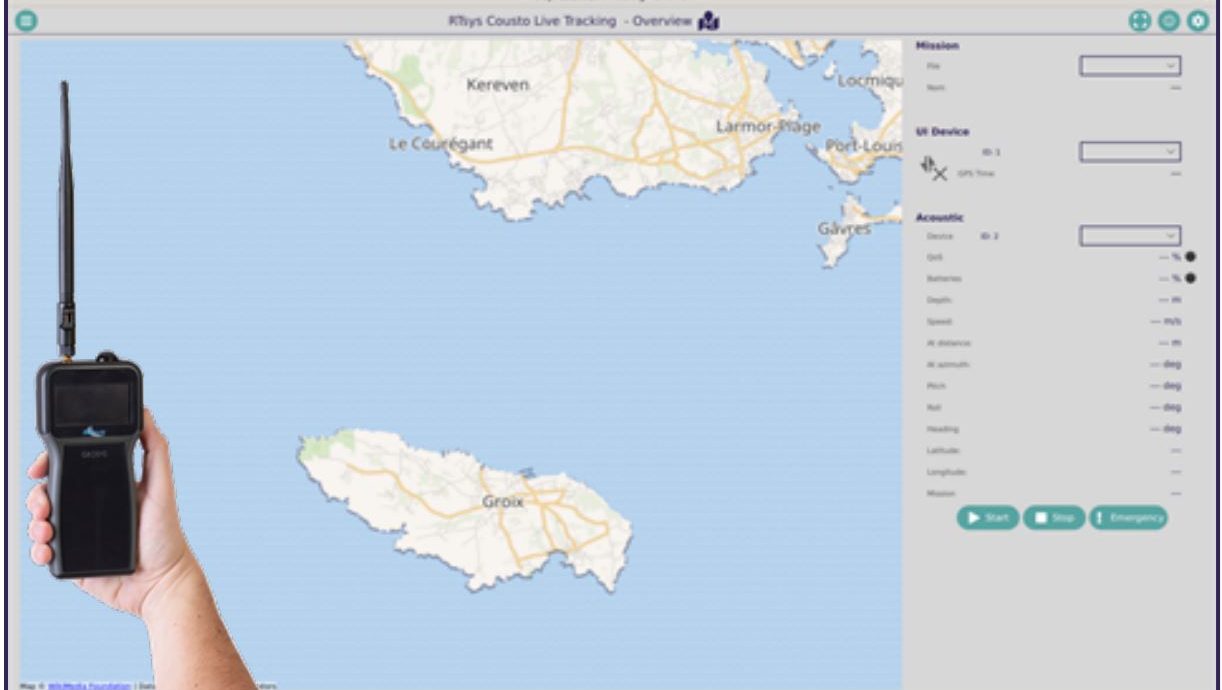
Real-Time Path Tracking
With integrated underwater acoustic communication systems, NemoAUV can be tracked in real time throughout its mission.
Compact Yet Powerful
Measuring under 0.9 meters in length, NemoAUV delivers high performance with a speed of 2 to 8 knots, endurance of over 10 hours, and operability in sea states up to level 4. It is truly a powerful tool for underwater exploration.
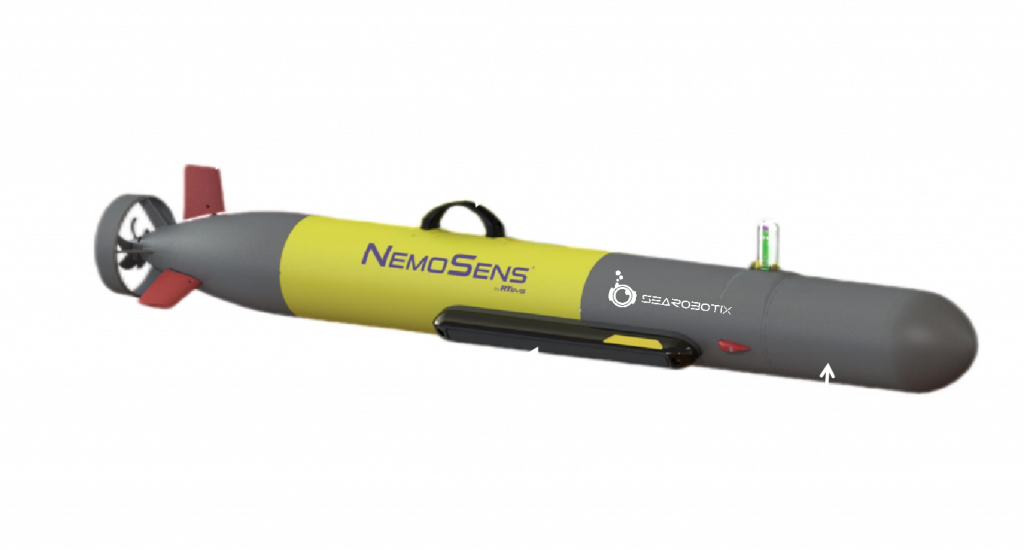
定制专属AUV
Optional Components
长基线水下定位系统
LBL
Enables AUV re-localization to significantly improve navigation accuracy and reduce drift over long missions.
水面通信单元
Surface Communication Module
Provides real-time underwater communication with the AUV for live path tracking and status monitoring.
超高频定位系统
Geosys UHF
Allows operators to search and locate the AUV, and issue essential commands such as mission termination.
Recommende Payloads
侧扫声呐
Side Scan Sonar
Used for mapping seafloor terrain and detecting underwater obstacles, supporting path planning and terrain awareness.
多普勒计程仪
DVL
Measures altitude above seafloor and relative velocity, essential for precise navigation, localization, and path control.
高度计
Single Beam Echosounder
Can be used to measure the altitude above the seabed
温盐深传感器
RBR Legato CTD
Can measure temperature, salinity, and depth of the AUV's surrounding environment
水下彩色高清摄像头
L3C-AHD
Can be used for underwater observation and photography
多参数探测仪
AML-3
The AML-3 multiparameter instrument supports both autonomous and real-time data transmission. It can directly accommodate 3 sensors and, with external integration, support up to 5 sensors. Optional sensors include sound velocity, conductivity-temperature, pressure, turbidity, and more.
磁力计 APS1540
Can measure magnetic field strength to provide more accurate heading information for the AUV






Explore the Depths Without Delay
NemoAUV A Compact, Portable, and High-Performance Open-Architecture AUV!