产品常见问题
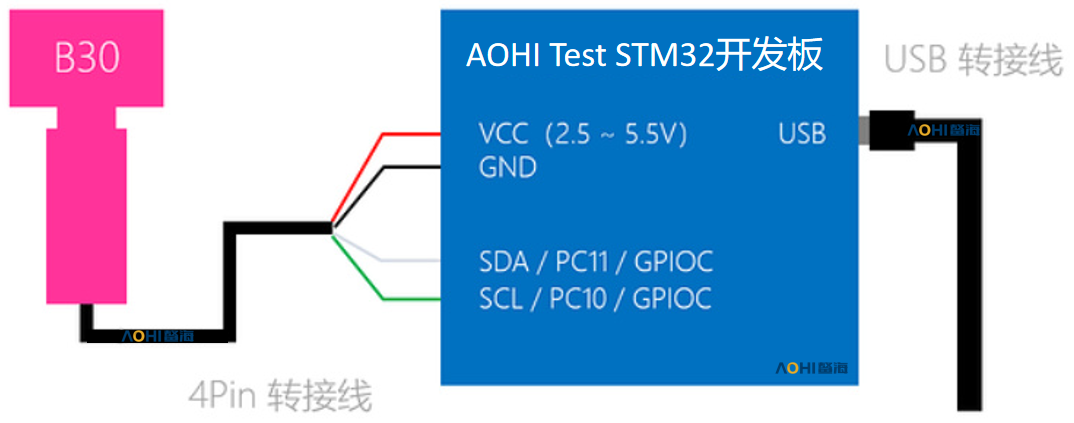
B30线序定义
| 红 | VCC(电源+) |
| 黑 | GND(电源-) |
| 绿 | IIC-SCL(时钟线) |
| 白 | IIC-SDA(数据线) |
B30与STM32参考接线图
B30深度等级
300m
B30通信协议
IIC/I2C
B30精度
当前量程的6‰
B30逻辑电平(IIC/I2C)
2.5-3.6V
B30测试时出现压力数据漂移
这是由MS5837-30BA的特性决定的,MS5837-30BA输出结果为绝对压力值。MS5837-30BA绝对压力计算受温度影响,当温度变化时会影响绝对压力值,因此会造成传感器数据偏移。具体漂移特性参考MS5837-30BA数据手册。实际使用时请根据所搭载的设备情况和环境特点进行软件算法优化。
I2C总线为什么要接上拉电阻
根据I2C总线规范,总线空闲时SDA与SCL电平都必须为高电平。
上拉电阻参考接法
