
P360 扫描声呐
低成本水下图像声呐
P360 是一种非常高性价比的水下扫描成像声呐,具有50 米的扫描范围,工作深度可达 300 米。同时开放上位机源代码,是海洋机器人技术的强大辅助工具。

水下探索新纪元
50 米测量范围

可调

360° 扫描范围
高解析度
* 量程精度的实际绝对值随着范围变化而变化,2m 量程时分辨距离为 1.6mm 。
P360 水下扫描声呐原理
P360 是通过声换能器发送的声能窄波束,然后监听回声。该声换能器安装在 P360 的旋转电机上,该电动机以 1° 为增量进行旋转。 P360 会生成声呐周围环境的圆形图像,最大范围为 50 米。它的成像结果类似于我们从新闻上看到的天气雷达或自动机器人上的激光雷达中看到的效果。
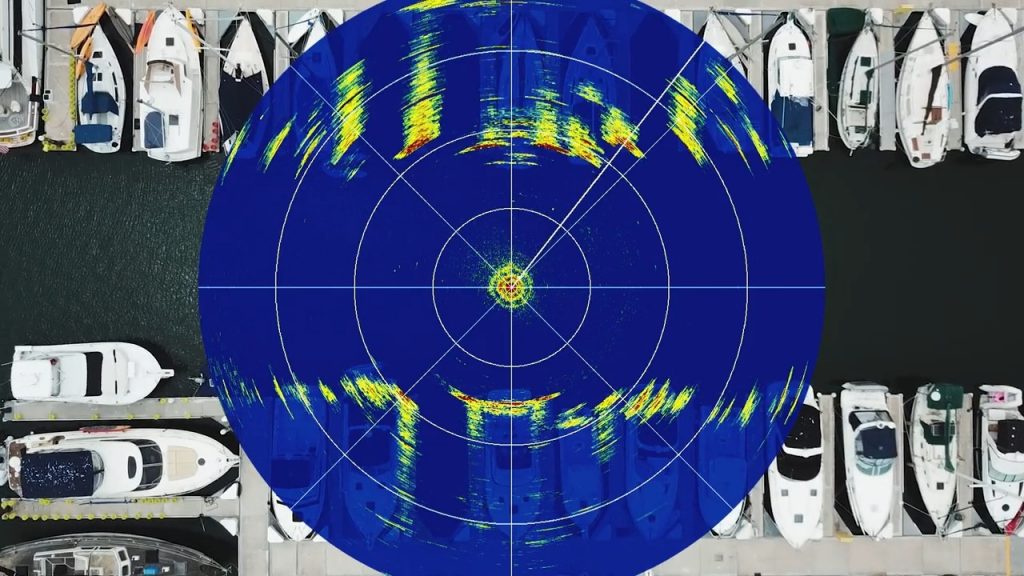
360° 环形扫描快速确定目标
P360 可以 360° 扫描四周目标,以快速确定目标所在位置。
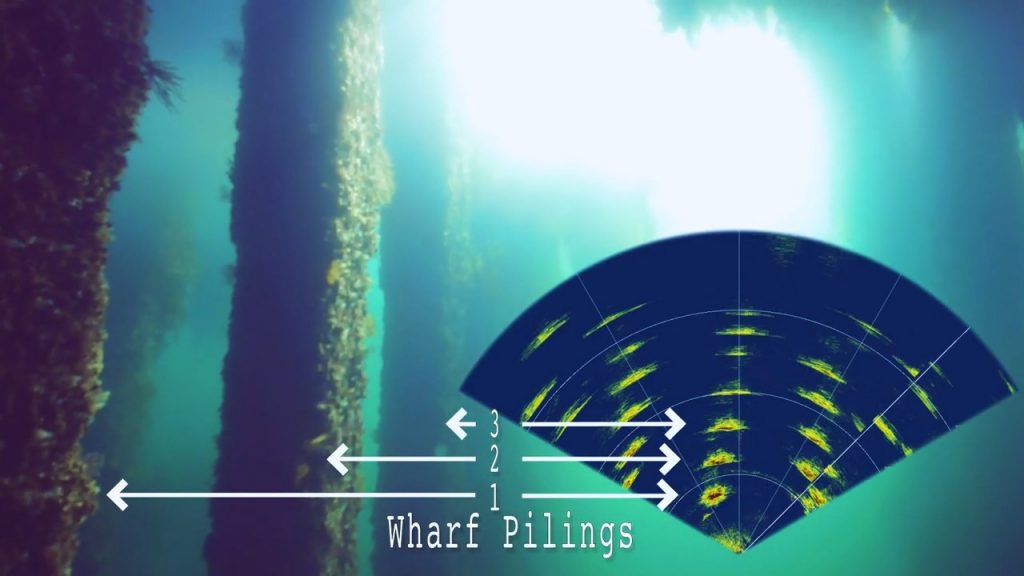
如图发现目标位置后,可准备进一步缩小扫描范围,使用“扇形”扫描。
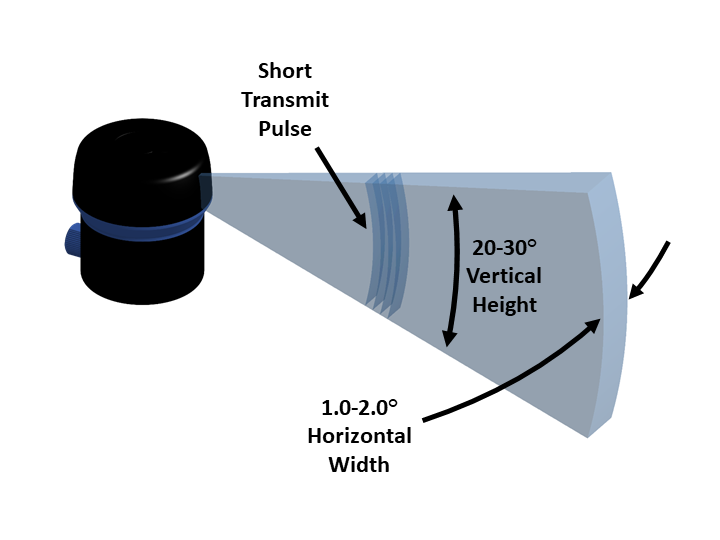
P360 波束发射原理图
当想象扫描声纳如何在声学上起作用时,通常将它们与在黑暗区域照亮手电筒进行比较。用户只能看到手电筒光束照射的区域,其余区域保持黑暗。
与光束相比,扫描声纳的声束具有固定的宽度和高度,称为水平和垂直波束图。正是这种声束用声能而不是可见光能“照亮”了周围的水下区域。

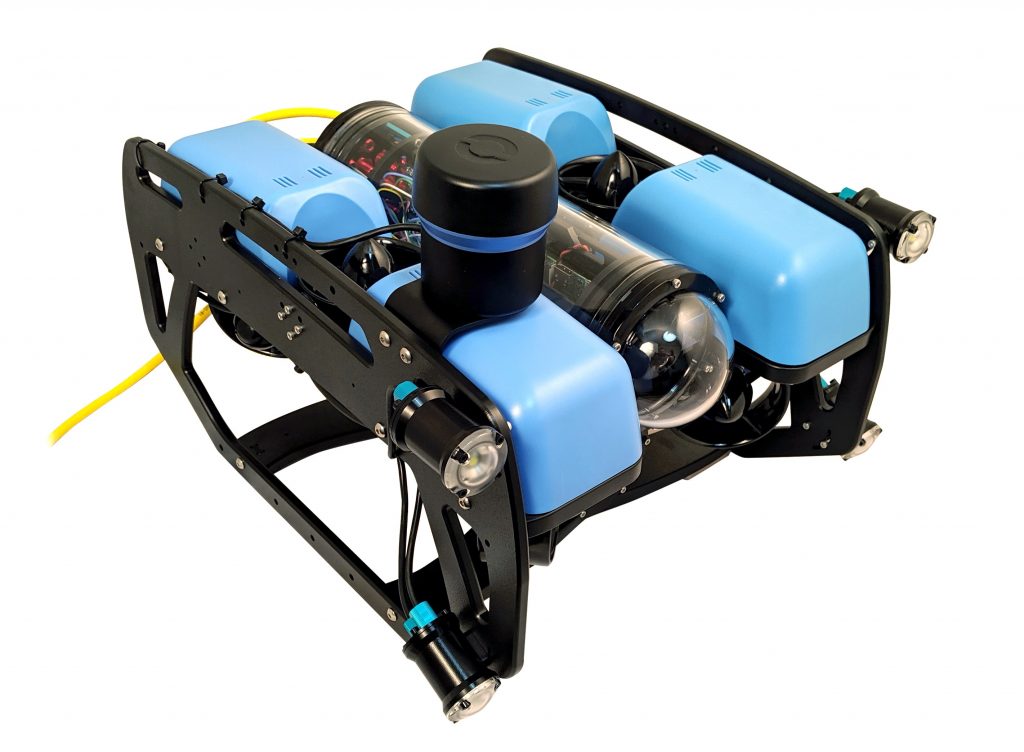
安装方便 无缝集成
P360 可以很方便的安装在 FindROV 等水下机器人上,实现无缝集成,真正做到了到手即用!


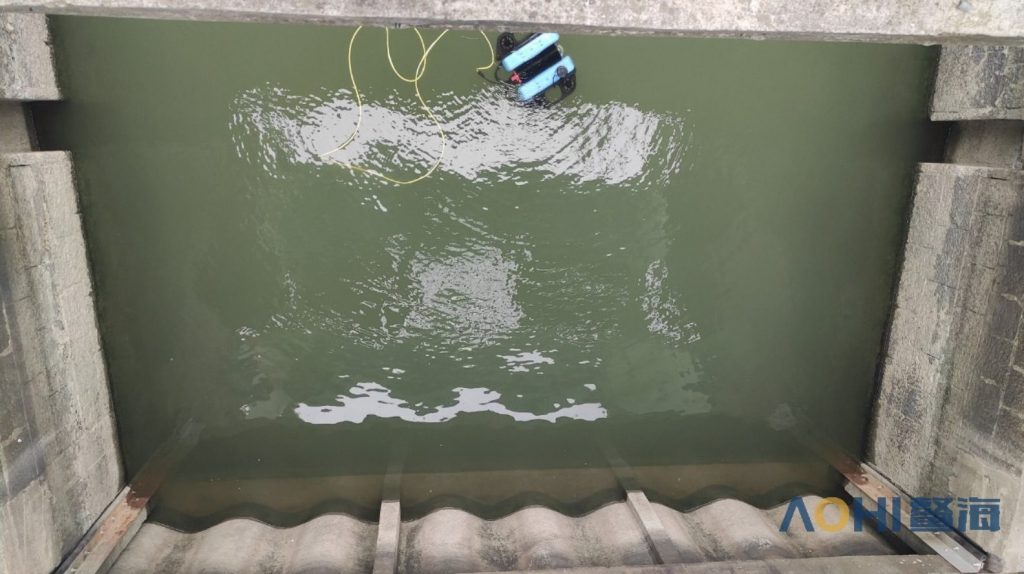


水下探索,即刻展开
通过搭载 FindROV / BlueROV等设备后,用户到达作业现场后,可迅速使用 ROV 开展测量、测绘等工作。