物理参数
| 展开尺寸(长×宽×高) | 120×93×46 cm | |
| 折叠尺寸(长×宽×高) | 120×71×24 cm | |
| 打包尺寸(长×宽×高) | 120×46×20 cm | |
| 重量 (不含电池或有效负载) | 14.5 kg | |
| 干舷(2节电池,无负载) | 160 mm | |
| 最大吃水深度(最大有效负载) | 320 mm | |
| 推进器 | 2×M200 电机,带防挂草螺旋桨 | |
| 螺旋桨直径 | 112 mm | |
| 导航灯 | 5V 2W LED,全白光,PWM 可编程闪烁 | |
| 主要材质 | LDPE(船体) | |
| 30% 玻璃填充聚碳酸酯 | ||
| 阳极氧化铝 | ||
| 不锈钢 |
性能指标
| 续航@1m/s(~30W),无负载 | ||
| 2 节电池(532 Wh, 2.4 kg) | 18 hrs(65 km) | |
| 4 节电池(532 Wh, 2.4 kg) | 36 hrs(130 km) | |
| 6 节电池(532 Wh, 2.4 kg) | 50 hrs(180 km) | |
| 8 节电池(532 Wh, 2.4 kg) | 62 hrs(220 km) | |
| 太阳能板(用户自行配备) | 不定 | |
| 最大速度( 2 节电池,无负载) | 6节(3m/s) | |
| 最大静态推力 | 8.2 kgf | |
| 空气中额定温度 | -25~40℃ | |
| 水中额定温度 | 0~40℃ | |
| 运动控制 | 滑移转向 |
有效负载 & 扩展能力
| 有效负载容量(电池+有效负载) | 15kg | |
| 有效负载功率 | 电池电压 @ 60A(直接连接) | |
| 电池电压 @ 10A(保险丝板) | ||
| 5V 辅助 @ 5A(保险丝板) | ||
| 可用端口/接口 | 3×UART 串口 | |
| 以太网(需要 BlueRobotics 以太网交换机) | ||
| 2×USB 2.0 | ||
| 3×USB 2.0 | ||
| 1×16 位 ADC(3.3V) | ||
| 1×16 位 ADC(6.6V) |
通讯指标
| 无线通讯协议 | 802.11a/b/g/n (2412 - 2462MHz) | |
| 无线路由器 | MikroTik RBGroove-52HPn | |
| 默认无线配置 | 客户端模式 (CPE) | |
| 基站默认地址 | 192.168.2.3 | |
| Boat默认地址 | 192.168.2.4 | |
| 附带天线 | 7 dBi 2.4Ghz Omnidirectional, N-Male Connector | |
| 通信范围 | 长达 250m (标配天线) | |
| >1 km (定向天线,非标配) | ||
| 蜂窝和卫星通信 | 可实现,详见集成指南 |
软件
| 车辆控制 | ArduRover | |
| 板载控制系统 | BlueOS | |
| 板载控制系统默认地址 | blueos.local (192.168.2.2) | |
| 推荐任务规划软件 | QGroundControl 或 Mission Planner | |
| 导航功能 | 手动控制(带操纵杆) | |
| 航路点导航(自动) | ||
| 点击导航(引导) | ||
| 位置保持(徘徊) | ||
| 返回原点(如果连接丢失) |
电子电气系统
| 板载计算机 | 装有 BlueOS 的 Raspberry Pi 4 | |
| 航行控制器 | Navigator | |
| 传感器 | 6-DOF IMU | |
| 双 3-DOF 罗盘 | ||
| 内部气压计 | ||
| GPS 全球定位系统 | mRobotics M10034-M9N,(NEO-M9N,IST8308) | |
| 电调 | ESC500 | |
| 电源负载切换 | 电源开关 (120A, 4S/6S Battery, Current/Voltage Sense, 5V/8A Out) | |
| 输入电压范围 | 12–26 VDC¹ (4S–6S Batteries) | |
| 推荐电池 | LB18 4S 锂电池 | |
| 4S 低电压断电保护 | 8 V | |
| 6S 低电压断电保护 | 12 V | |
| 5V 辅助输出 | 5 A | |
| 独立电池保险丝 | 60 A MIDI | |
| 系统熔断器 | 150 A MIDI | |
| 保险丝板 | Mini-ATC (含 2A, 5A, 10A 保险丝) |
推荐计算机配置
| 处理器 | i5 及以上 | |
| 内存 | 8GB 以上 | |
| 硬盘 | 固态硬盘 SSD | |
| 兼容操作系统 | Windows 10 64 位或更高版本 | |
| MacOS10.20 或之后 | ||
| Ubuntu 20.04 LTS 或更高版本 |
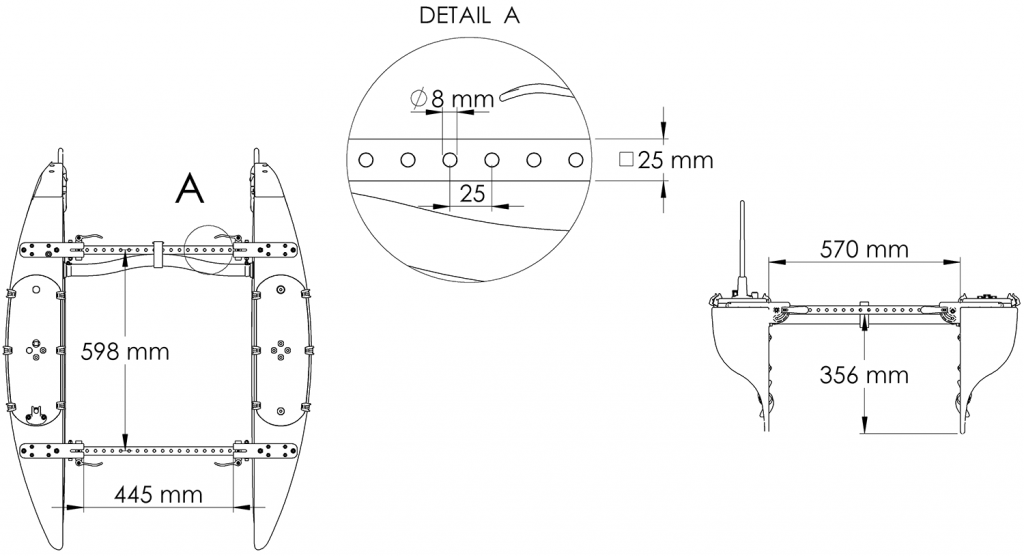
机械尺寸