P360 扫描声呐快速安装手册
产品介绍
P360 声呐是机械扫描声呐。当安装在 BlueROV2 上并使用 Ping-Viewer 软件应用程序时,P360 可用于在低能见度的水况下导航、检查、避障、目标定位和跟踪。让用户可以看到来自水下物体的回声,例如绳索、岩壁、码头桩、船只以及任何其他科反射声波的结构或物体。这样,无论水中能见度是否高,用户都可以参考声呐扫描图来导航,并且快速定位水中重要的特征。

零件和工具
您需要
- 1 × 十字螺丝刀
- 1 × 2.5mm六角螺丝刀
- 1 × 套筒扳手
- 1 × 记号笔
- 1 × 5.50mm 钻头
- 1 × 电池供电的手电钻
- 1 × 螺纹胶
- 1 × 硅脂
卸下穿线螺栓堵头
卸下电子舱并取下电子舱金属壳体和 ROV 前面的透明半球罩
1. 为确保 ROV 完全断电,请取出电池并将其放在一边。
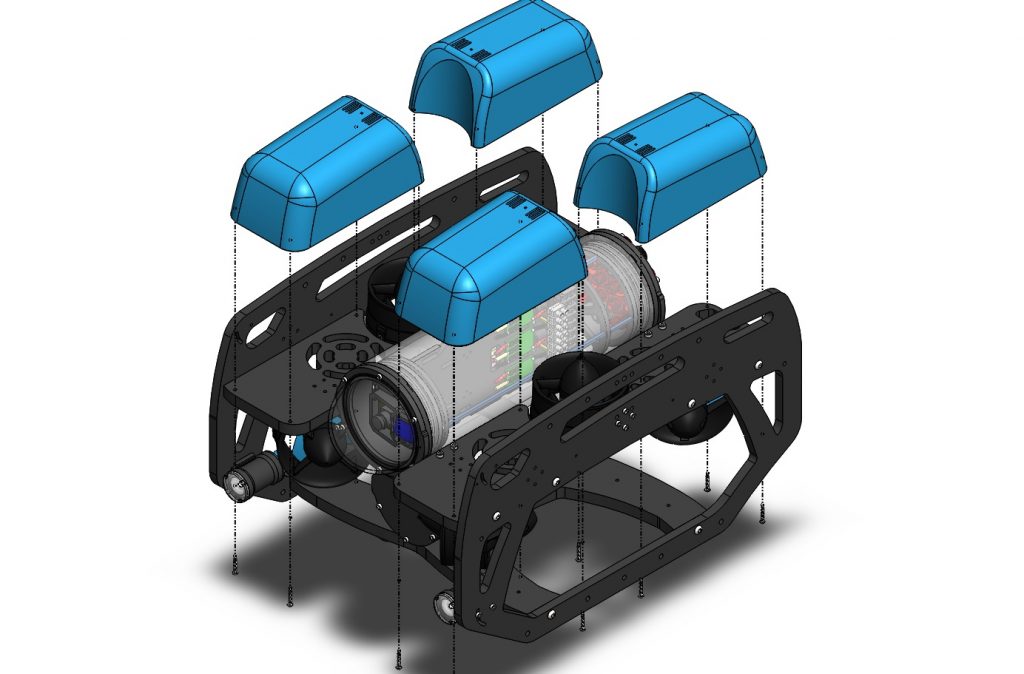
2.通过卸下将浮材罩固定在框架上的自攻螺钉,卸下浮材罩和浮力块。
3.通过松开固定电子舱的螺栓,从ROV上卸下电子舱。
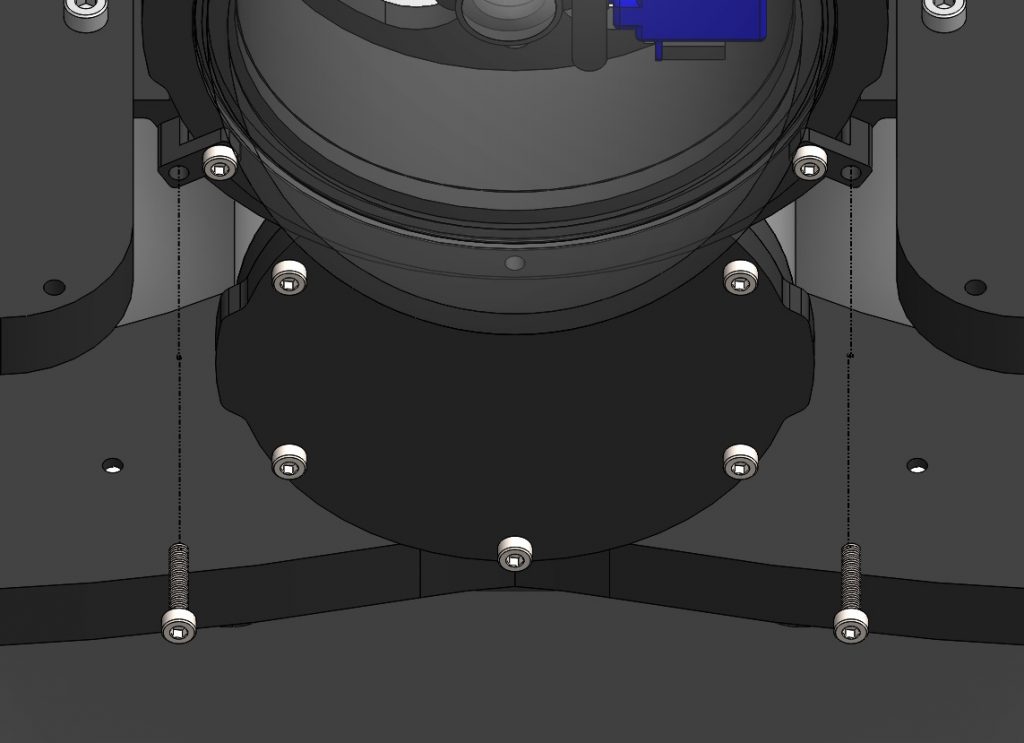
4.先取下尾部的通气螺栓,然后取出电子舱金属壳体(包含头部的透明半球罩)
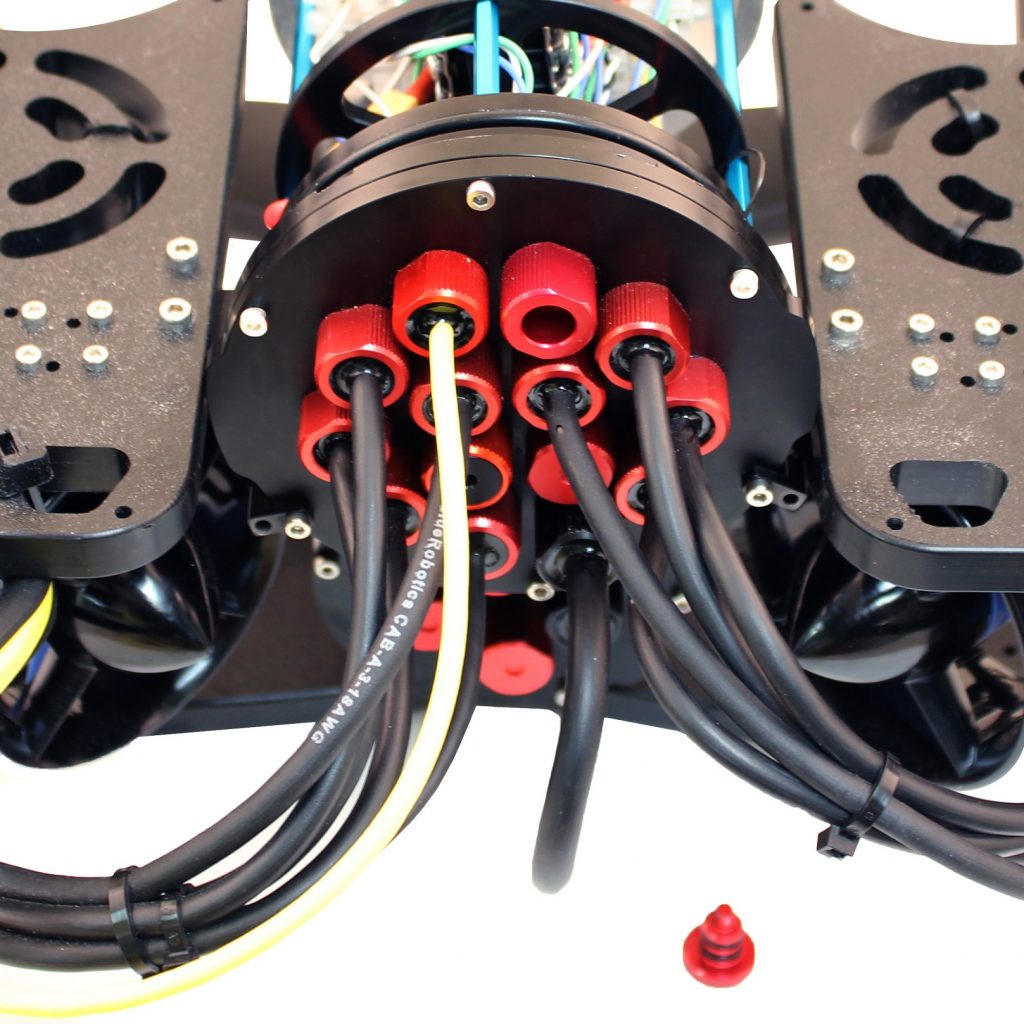
5.用套筒扳手从端盖上取下该孔位的穿线螺栓堵头。
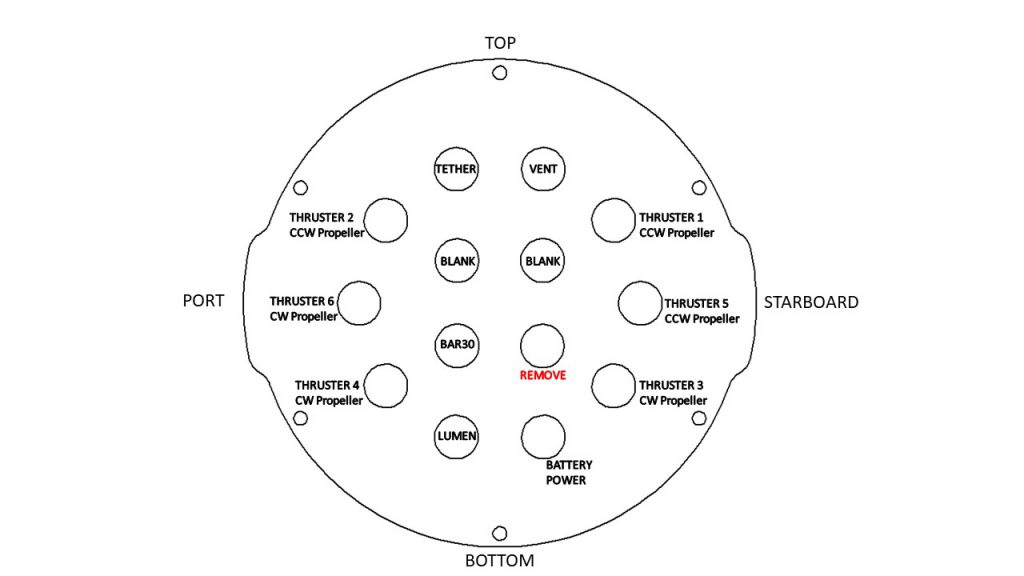
安装 P360 至 ROV
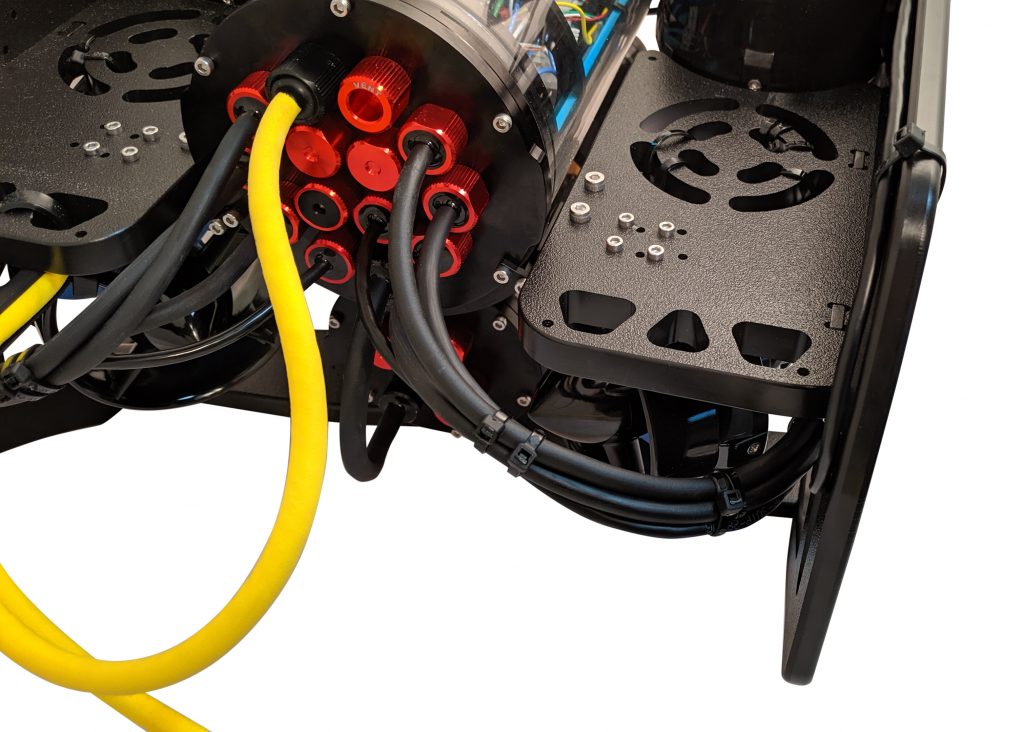
将 P360 的穿线螺栓或水密接插件安装至相应孔位,如图所示

穿线螺栓的使用和安装可参考相应教程
接线(USB)
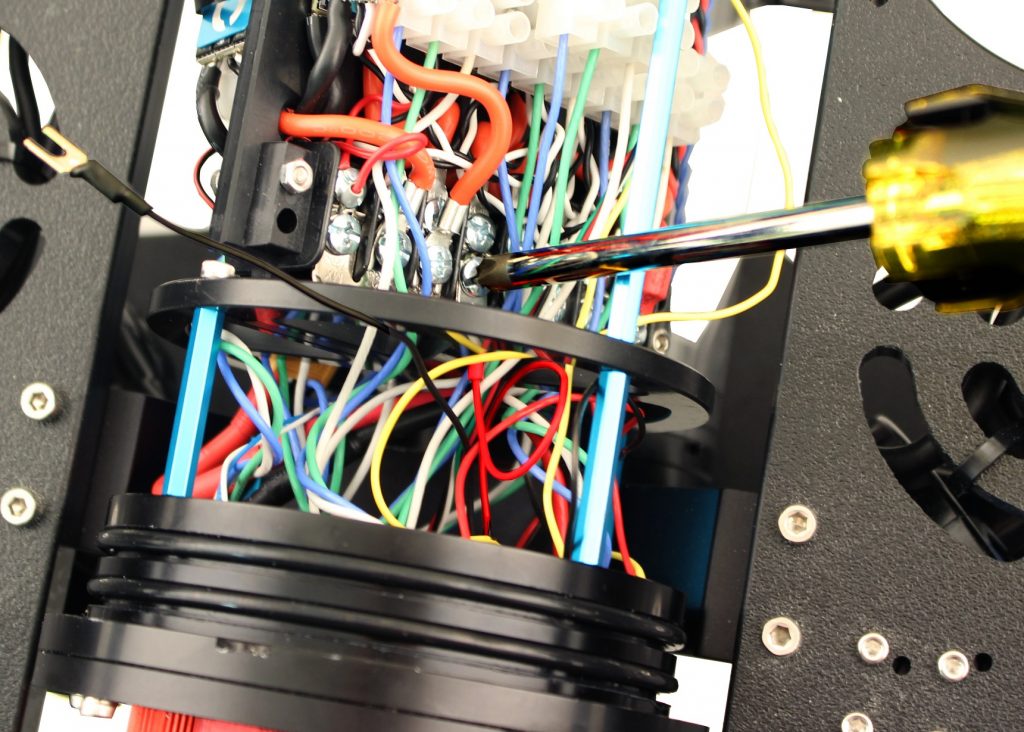
1、将电源线(红色和黑色)连接到相应正负极接线板。(红:正极;黑:负极)
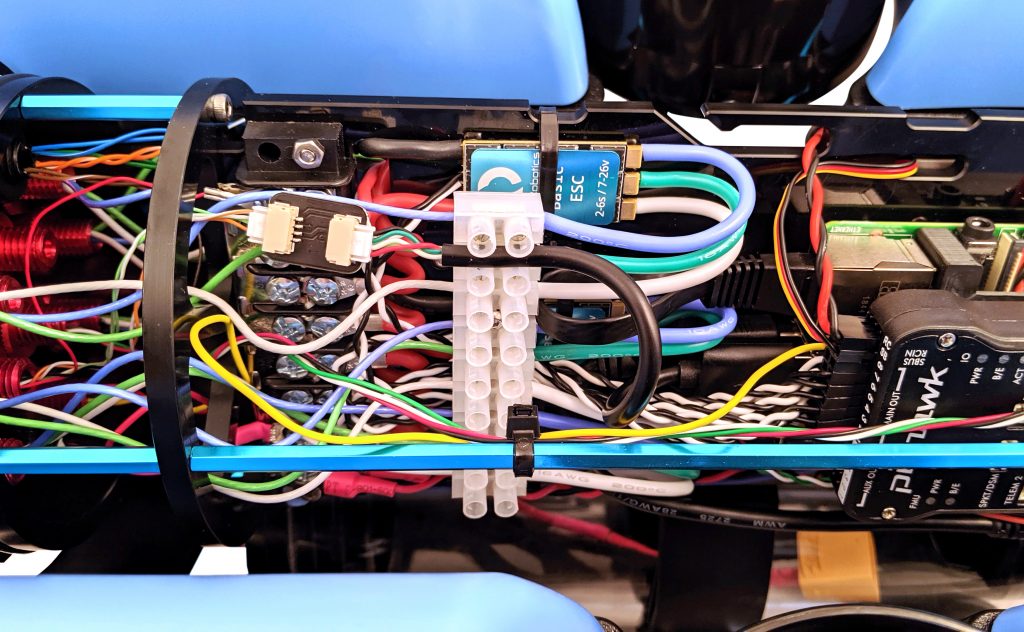
2、按下图连接,将 JST-GH 转 USB-A 接口插入 树莓派上。

P360 安装固定
1、选择安装在 ROV 的左舷或右舷。本指南选择了右舷。
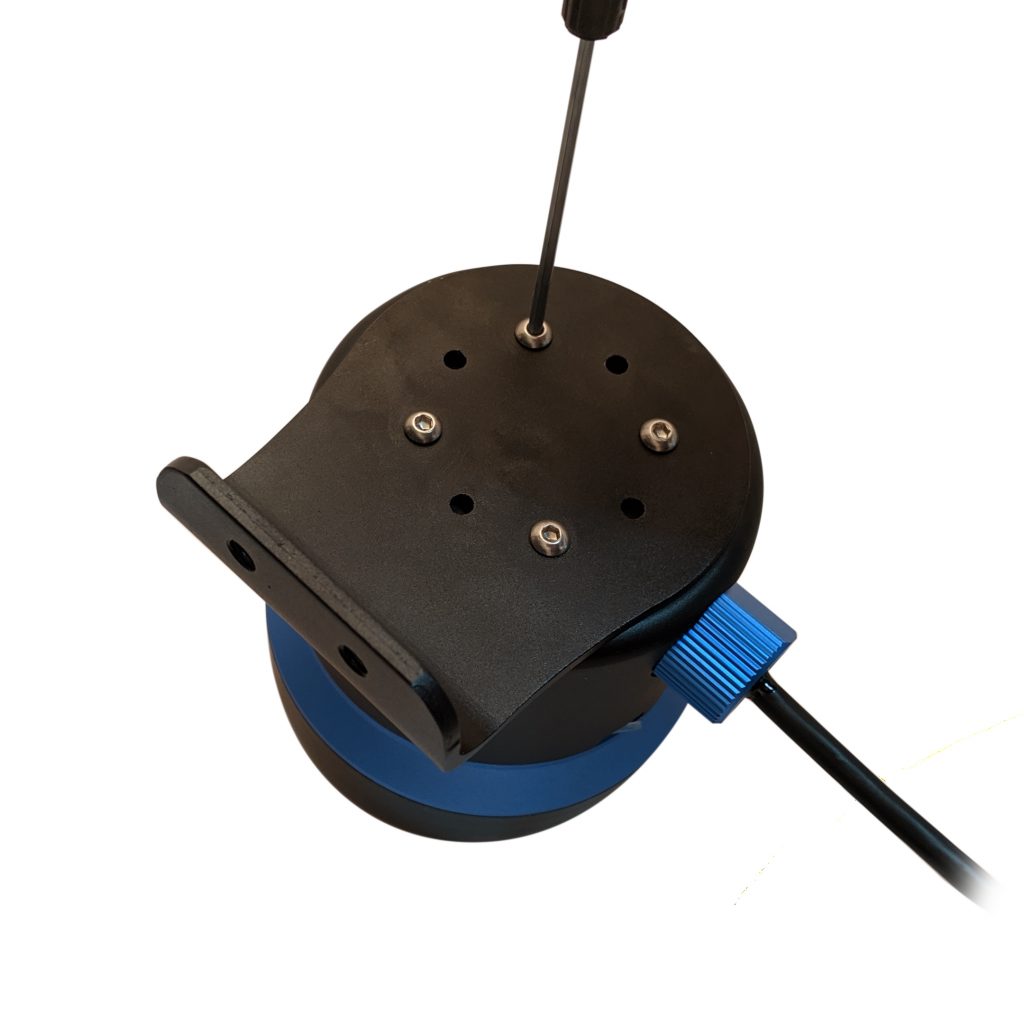
2、将 M5 × 12 螺钉拧入安装支架的最后一个孔中。将组件插入 ROV 框架上最前面的 M5 孔中。调整支架,使其保持水平且笔直,并用记号笔标记前孔位置。
3、卸下支架部件并卸下 M5 × 12 螺钉。
4、使用手电钻和 5.50 mm 钻头,在标记的位置钻一个直孔。
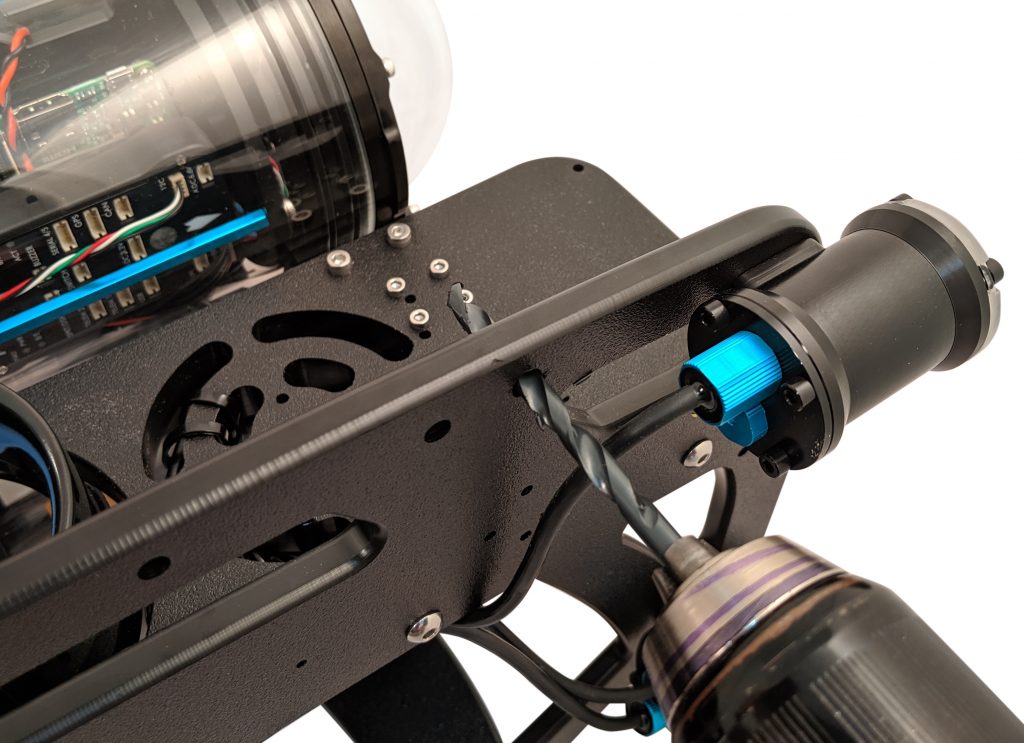
5、使用 M3 × 5 mm 螺钉将 P360 固定到支架的基座上。
6、用 M5 × 12 螺钉将支架固定到 ROV 框架上。


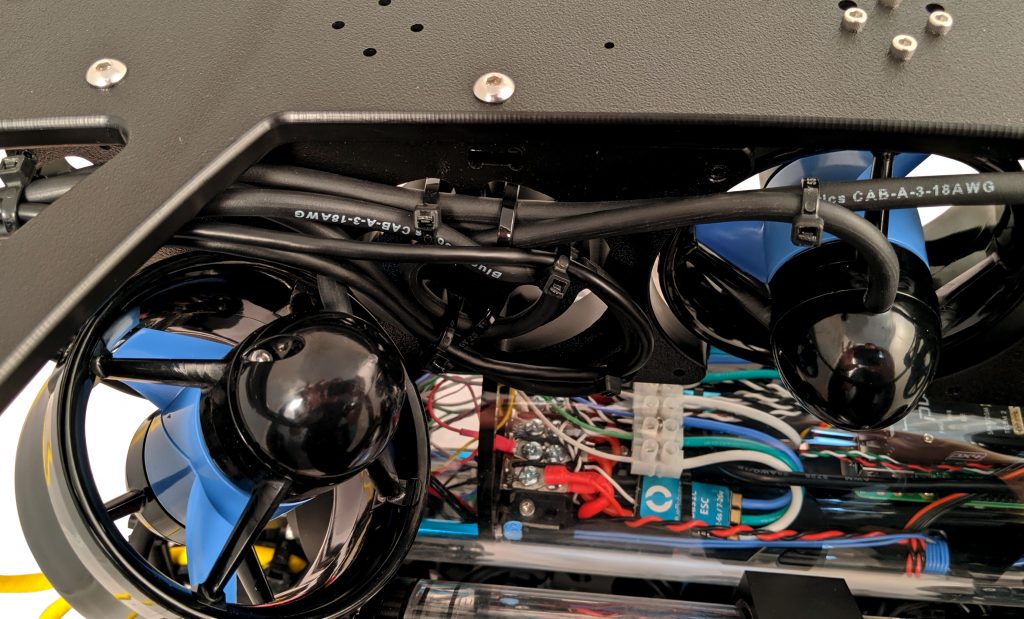
电缆整理
安装完后需要对 P360 的电缆及时整理,以防止被推进器等设备划伤。

软件设置
树莓派固件版本需 0.0.18 以上, PingViewer 版本需要最新稳定版本。详情参考 PingViewer 声呐软件使用手册。
故障排除
PingViewer 无法连接到 P360
1、重新检查 P360 的接线。
2、检查所安装的树莓派版本。 P360 需要 0.0.18 或更高版本的树莓派。
3、检查 PingViewer 的版本是否为最新稳定版。