标签: "客户案例" (7)

客户案例 | 鳌海水下机器人赋能港口水下应急救援
2026年7月13日
客户案例 | 鳌海水下机器人赋能城市河道水下构筑物检测
2026年6月2日

客户案例 | 鳌海水下机器人助力核电冷却系统水下运维
2026年5月25日
客户案例 | 鳌海水下机器人助力国家重大水电站智能运维
2026年5月15日

产品动态 | 新型浮岛式水下机器人
2022年9月10日
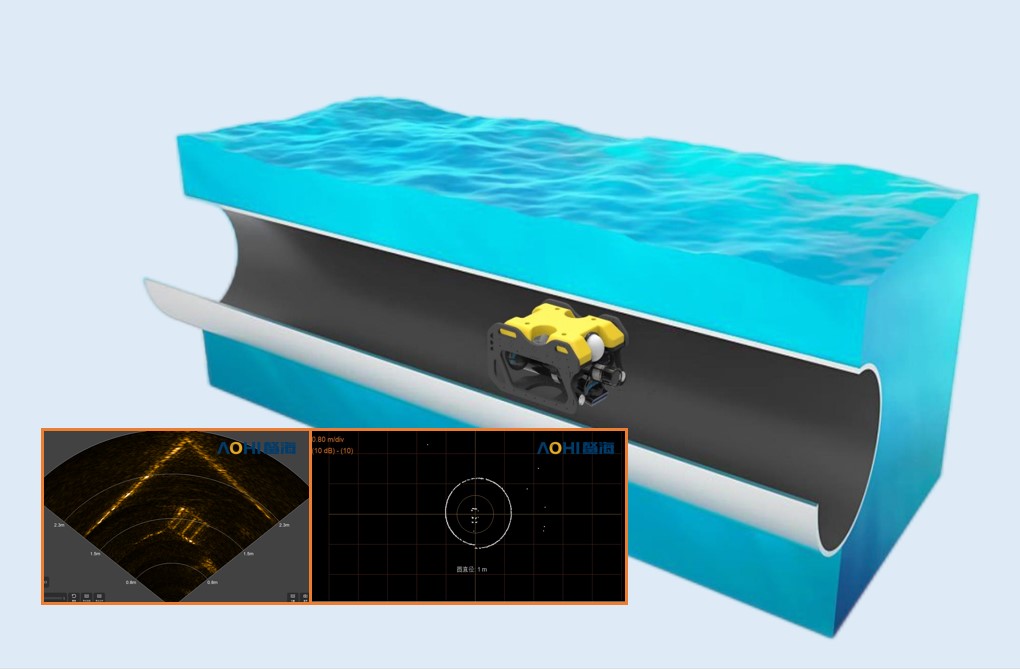
客户案例 | 水下机器人助力城市地下管网检测
2021年10月1日